|
Comment est faite la Station Spatiale Internationale... |
![]()
Visiteurs...
|
Actualité L' ISS rappelons-le, est actuellement commandée par un Ukrainien devenu russe, et qui doit donc avoir des proches des deux côtés de la frontière... https://fr.wikipedia.org/wiki/Anton_Chkaplerov commandant de l' ISS. Quels impacts la crise ukrainienne pourrait-elle avoir sur l'ISS ? Premièrement, malgré les affirmations passées de la Russie selon lesquelles elle pourrait désancrer ses modules ISS, ce n'est tout simplement pas techniquement faisable. Les segments russe et américain sont tout simplement trop profondément intégrés et fournissent tous les deux des services dont l'autre a besoin. Toutes les fonctions de commandement et de contrôle et de soutien à la vie du segment russe sont désormais entièrement répliquées sur le segment américain. Cependant, la seule chose que le segment russe fournit et que le segment américain n'a pas, c'est un soutien propulsif. Les moteurs du segment russe fournissent toute la capacité de reboost de l'ISS, et ses propulseurs sont le seul moyen de contrôle d'attitude propulsif. (Les gyroscopes à moment de contrôle du segment américain maintiennent généralement le contrôle d'attitude de l'ISS, mais parfois les propulseurs du segment russe sont nécessaires pour des manœuvres de changement d'attitude plus importantes.) La Russie ne pourrait pas simplement "retirer" le soutien propulsif du segment américain, car, puisque les deux segments sont physiquement attachés, cela impliquerait également de le retirer d'eux-mêmes, le résultat final étant que les deux segments finiraient par retomber sur Terre. (Il convient de noter que le dernier véhicule Cygnus à arriver à l'ISS dispose, pour la première fois, de la capacité de rebooster l'ISS. Cependant, étant donné que Cygnus se fixe à l'ISS en plein centre de la station, il est capable de fournir une attitude le contrôle serait probablement insuffisant) Malgré la question de la propulsion, la NASA détient un atout majeur. Le segment russe devait initialement avoir sa propre tour de panneaux solaires, mais il a été annulé pour des raisons budgétaires. Depuis lors, le segment russe est dépendant du segment américain pour l'approvisionnement en énergie électrique. Il existe un composant appelé l'unité de conversion américain-russe (ARCU) qui transforme l'alimentation américaine 124VDC en alimentation russe 28VDC. Sans cela, le segment russe serait incapable de produire suffisamment d'énergie pour subvenir à ses besoins. La NASA pourrait menacer d'éteindre cet appareil, cependant, comme le scénario de propulsion, c'est une menace vide. Un segment russe sans puissance adéquate ne serait pas en mesure de fournir un soutien propulsif, donc la NASA marquerait un but contre son camp avec ce mouvement. Les Russes et la NASA échangent parfois du "temps d'équipage" contre de l'aide pour des tâches sur leurs segments respectifs. Les Russes pourraient ordonner à leurs cosmonautes de fermer définitivement l'écoutille au segment américain, de sorte que les deux segments deviennent essentiellement deux stations distinctes. Cela aurait cependant des problèmes pour les scénarios d'urgence, et on peut se demander si les équipages, qui vivent et s'entraînent ensemble depuis des années, exécuteraient même cet ordre. Le domaine le plus évident qui pourrait être affecté est le récent accord réciproque pour faire voler des Russes sur Dragon en échange de faire voler des Américains sur Soyouz. Les problèmes d'ITAR et de visa pourraient maintenant rendre cela plus difficile. Cependant, s'il était annulé, la NASA serait confrontée à l'obligation de supprimer l'équipage du segment américain si Dragon ou Falcon 9 rencontraient un problème entraînant une immobilisation, au moins jusqu'à ce que Starliner soit mis en ligne (ce qui est encore probablement dans plus d'un an). ). En fin de compte, le simple fait est que les segments russe et américain dépendent l'un de l'autre pour leur survie, donc la NASA et la Russie vont devoir continuer à coopérer au moins à un certain niveau. De plus, n'oublions pas que la NASA possède techniquement le module russe Zarya, après l'avoir acheté à l'agence spatiale russe à court d'argent afin de lancer la construction de l'ISS en 1998. Autre ajout : le premier étage de la fusée Antares, utilisée pour lancer le véhicule de ravitaillement Cygnus, est fabriqué en Ukraine par Yuzhnoye & Yuzhmash, le moteur RD-181 du premier étage étant un moteur russe. La disponibilité de ces composants pourrait devenir un problème sérieux. (Cygnus est capable d'être lancé par l'Atlas V, mais tous les lancements restants de ce booster ont déjà été réservés en attendant son remplacement par la fusée Vulcan.) Un autre point : les systèmes de survie du segment russe (en particulier le système de génération d'oxygène Elektron et l'épurateur de CO2 Vozdukh) sont anciens, peu fiables, tombent souvent en panne et nécessitent une maintenance. Si les écoutilles étaient fermées entre les segments (ce qui empêcherait la circulation d'air entre eux), la Russie serait totalement dépendante de ses propres systèmes de survie et ne pourrait pas être prise en charge par les systèmes de la NASA en cas de panne.
|
|
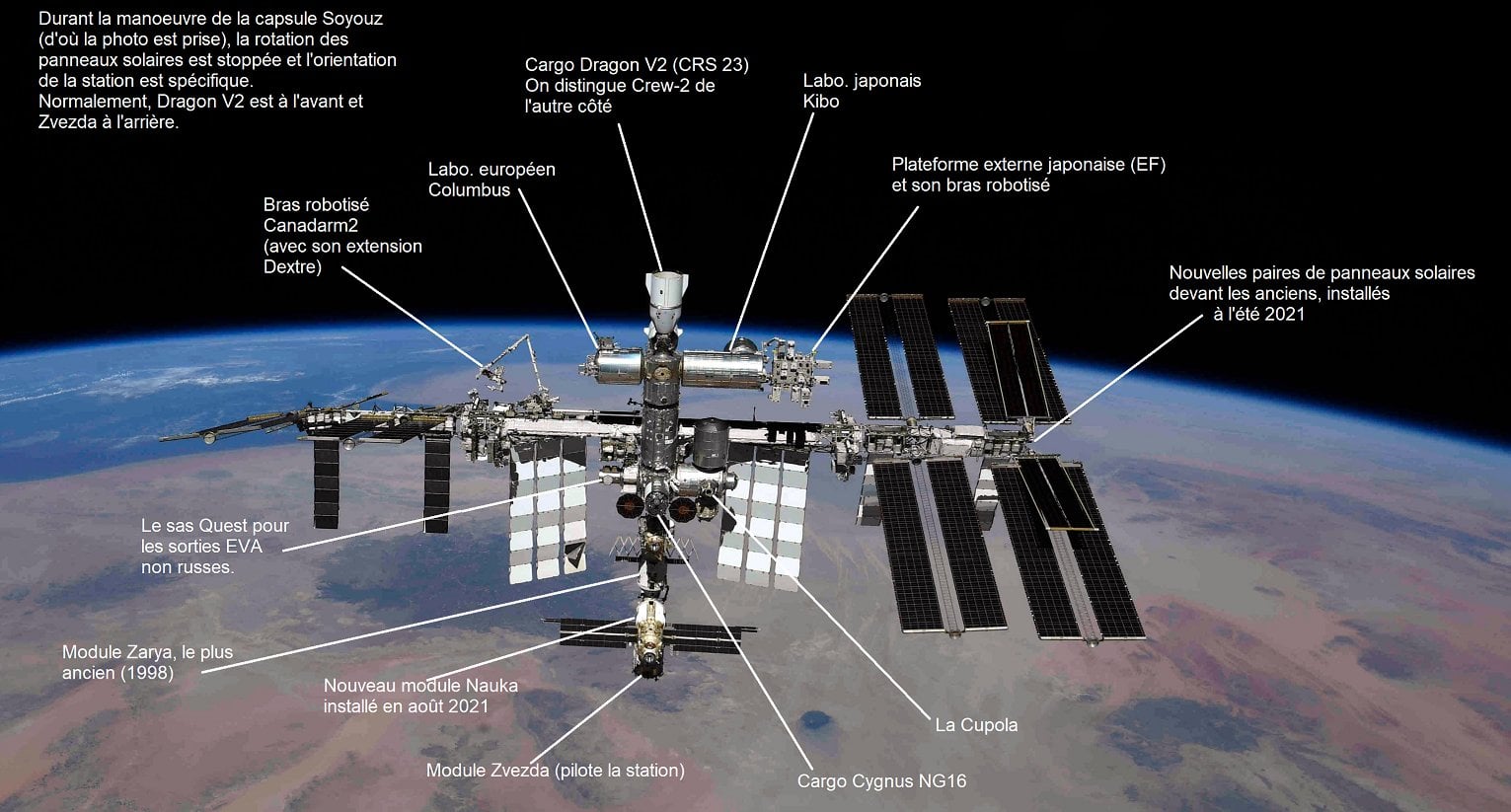
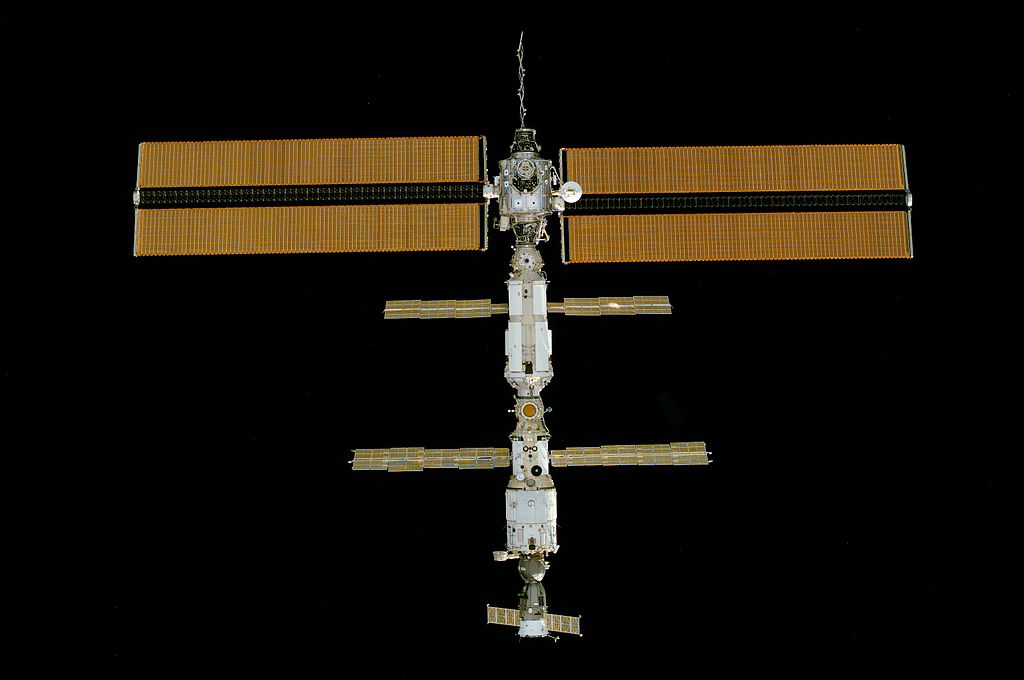
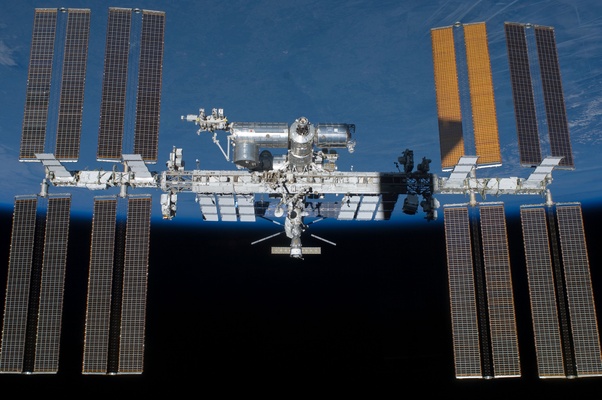
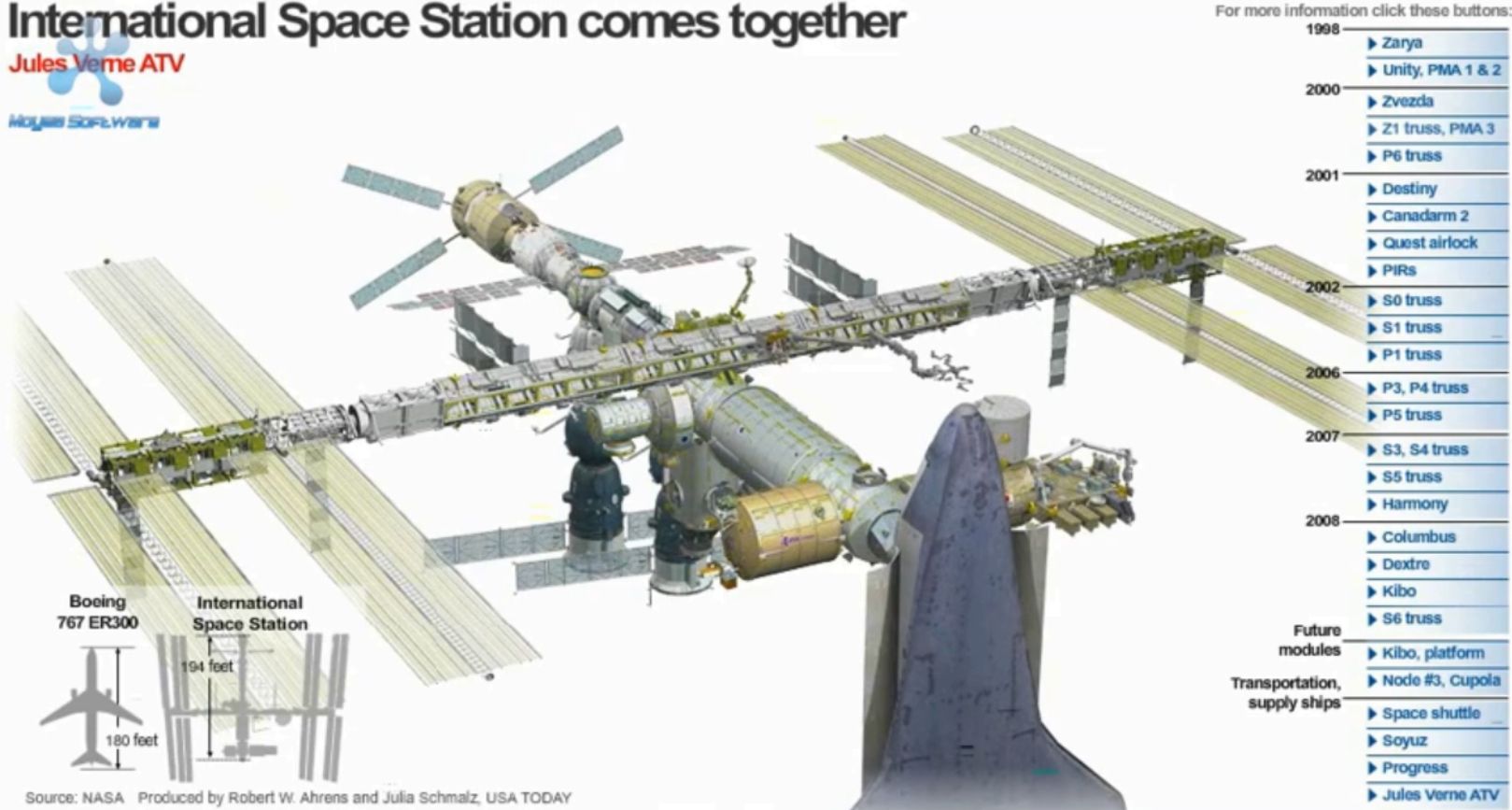
Sa construction débute le 20 novembre 1998 lorsqu’une fusée russe Proton met en orbite le module Zarya («Aube»). Trois semaines plus tard, la navette spatiale Endeavour embarque le premier module américain, le nœud de jonction Unity, et assemble les deux éléments. Le troisième module, Zvezda («Etoile»), arrive en juillet 2000 et ouvre la voie à une occupation humaine permanente qui commence le 2 novembre 2000. La station spatiale internationale est le fruit de la collaboration entre quinze pays : les Etats-Unis, la Russie, le Japon, le Canada et onze pays européens. Elle a vu le jour grâce à la fusion de trois projets plus anciens : la station spatiale américaine Freedom, la station soviétique Mir 2 et le laboratoire européen Columbus. Plus d’une dizaine d’années sera ensuite nécessaire pour donner à la station spatiale son apparence actuelle, avec en particulier l’installation des premiers panneaux solaires américains en l’an 2000, du laboratoire américain Destiny en 2001, du nœud Harmony en 2007 et des laboratoires européen Columbus et japonais Kibo («Espoir») en 2008. Cette construction sera malheureusement endeuillée et ralentie par l’explosion de la navette Columbia en février 2003. En juillet 2011, la station atteint sa configuration finale, mis à part le laboratoire russe Nauka («Science») et le bras robotique européen, tous deux prévus pour être lancés plus tard.
|
|
|
ZARYA |
|
|
|
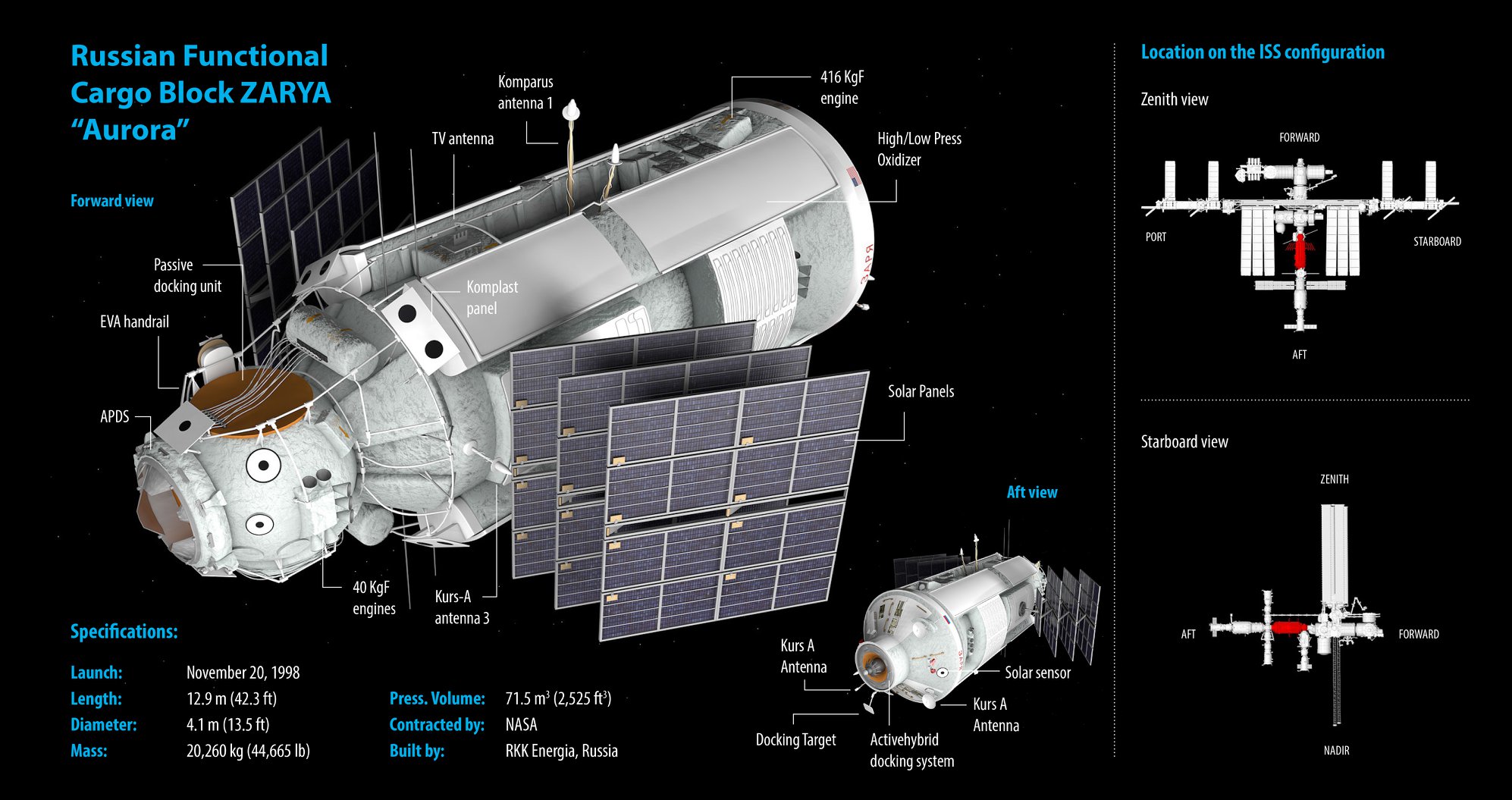
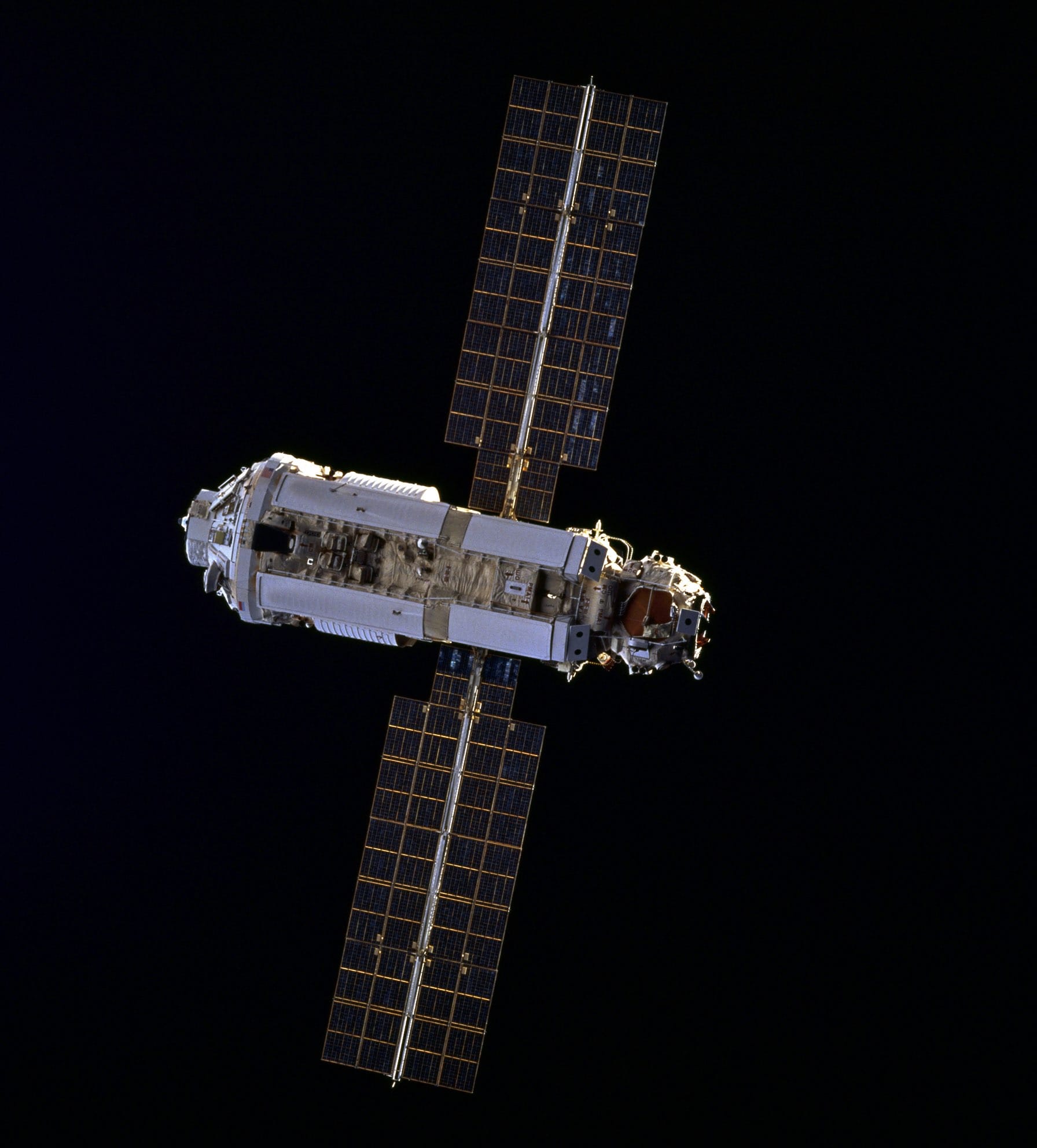
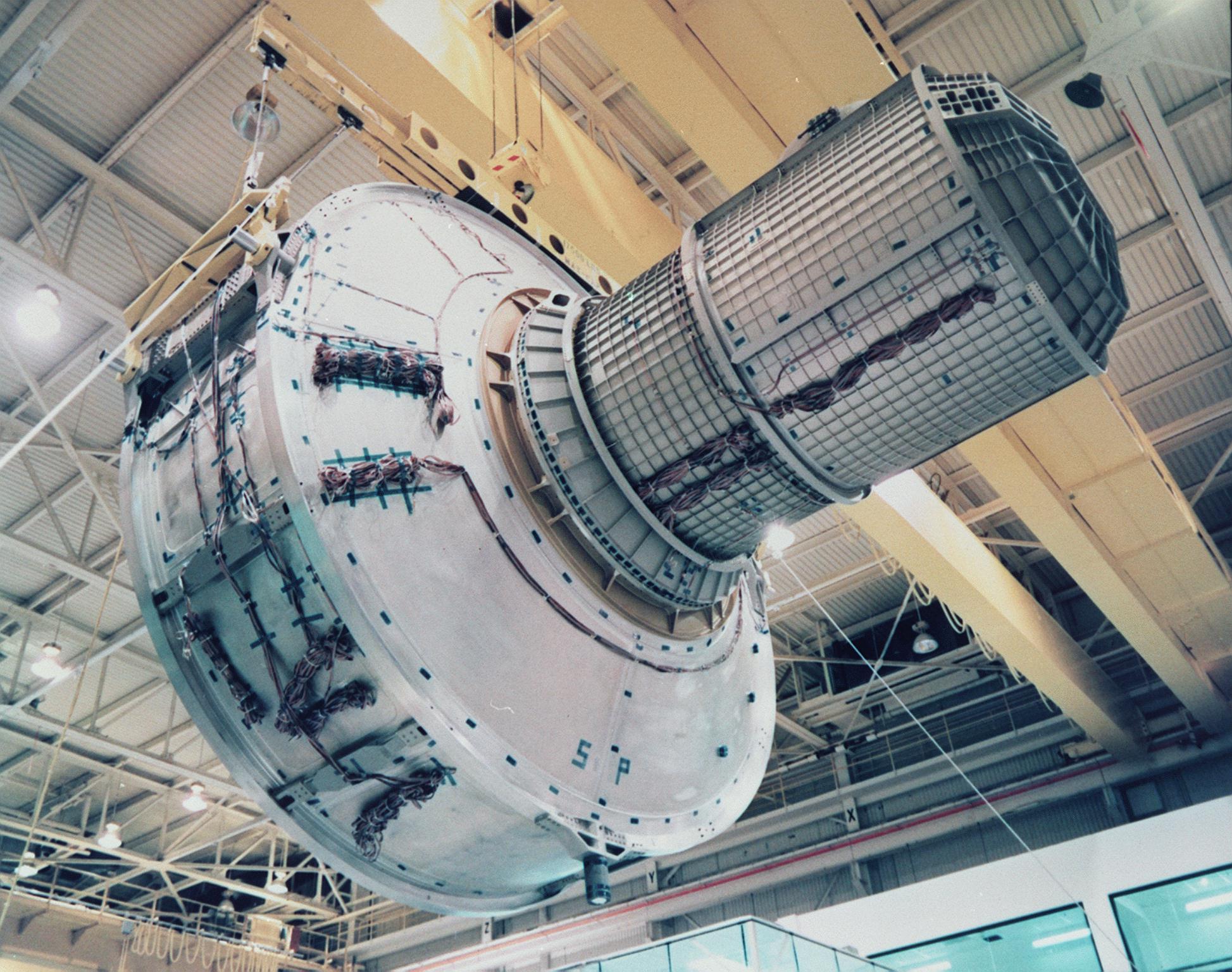
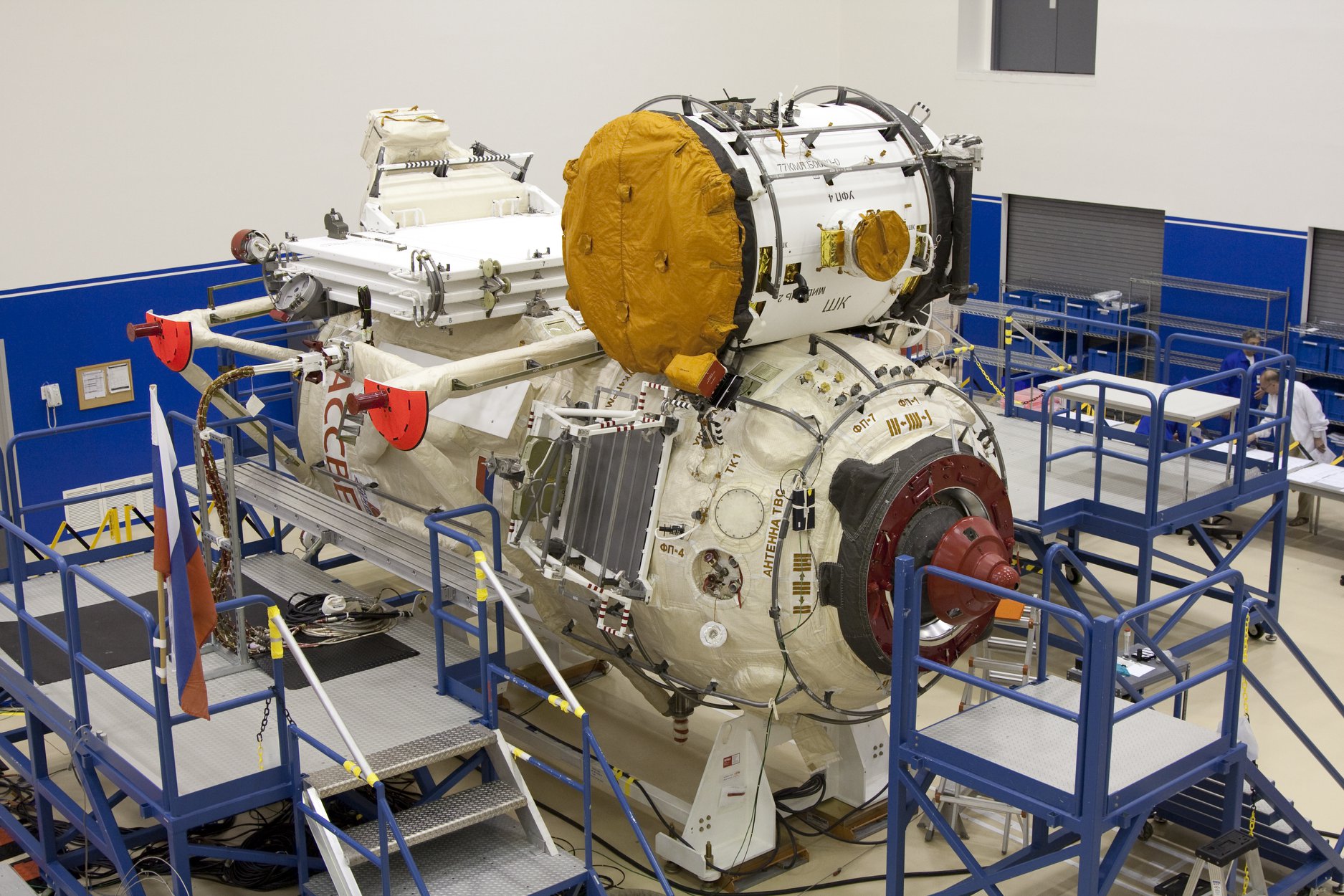
Zarya (du russe : Заря́ « aube » ), ou Functional Cargo Block (FGB, acronyme latin du russe : функционально-грузовой блок, Founktsional'no-grouzovoï blok), est le premier module de la Station spatiale internationale (SSI ou ISS d'après l'anglais International Space Station) à être mis en service. Construit par la société russe GNPKZ Krounitchev pour le compte de la NASA, il est mis en orbite le 20 novembre 1998 par le lanceur russe Proton et est rejoint deux semaines plus tard par le module américain Unity, puis en 2000 par le module d'habitation pressurisé russe Zvezda. Zarya est un module pressurisé de forme cylindrique d'environ 19 tonnes qui assure initialement une partie de l'approvisionnement en énergie électrique du segment russe de la Station à l'aide de ses panneaux solaires, permet de stocker du matériel, et contribue au contrôle de l'attitude de la Station spatiale durant les premières phases de l'assemblage. Depuis l'arrivée d'autres modules, Zarya sert principalement de lieu de stockage d'équipements, de pièces de rechange et d'ergols pour le module de propulsion de Zvezda. Pour en savoir plus : |
|
UNITY |
|
|
|
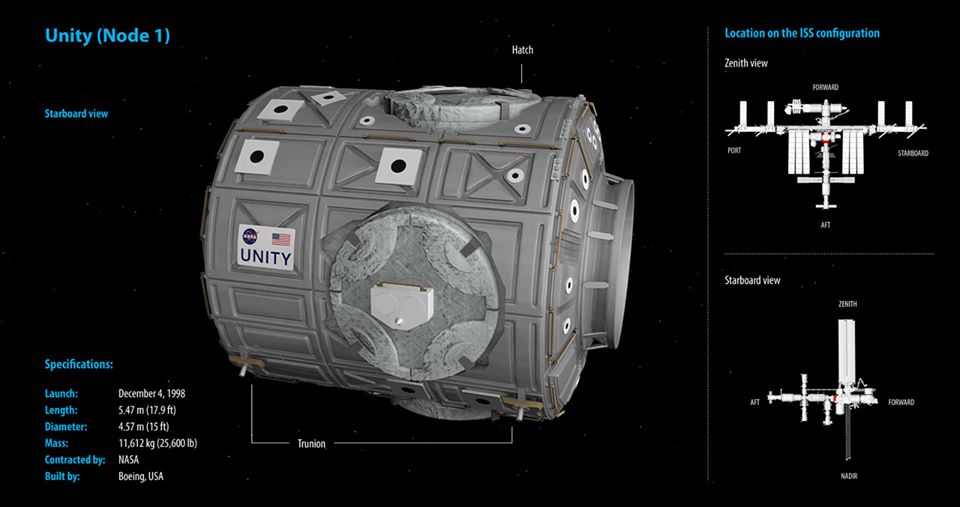
Unity (également appelé Node 1) est le second module de la Station spatiale internationale, et le premier construit par les États-Unis. Unity est un module de type nœud qui, avec ses six ports d'amarrage permet de réunir 6 autres composants. Unity est le premier des trois modules de connexion qui équipent la StatioUnity (également appelé Node 1) est le second module de la Station spatiale internationale, et le premier construit par les États-Unis. Unity est un module de type nœud qui, avec ses six ports d'amarrage permet de réunir 6 autres composants. Unity est le premier des trois modules de connexion qui équipent la Station. Il joue un rôle structurel unique en reliant le segment américain au segment russe de la Station spatiale ainsi qu'en assurant la liaison mécanique avec la poutre qui supporte les principaux systèmes de production d'énergie et de régulation thermique ainsi que des pièces de rechange et certains équipements scientifiques. Unity est un cylindre d'une masse à vide de 11 612 kg, 5,47 m de long et de 4,57 m de diamètre. Le module Unity contient 4 emplacements pour des rangements amovibles de type International Standard Payload Rack (ISPR).
Pour en savoir plus. Il joue un rôle structurel unique en reliant le
segment américain au segment russe de la Station spatiale ainsi
qu'en assurant la liaison mécanique avec la poutre qui supporte les
principaux systèmes de production d'énergie et de régulation
thermique ainsi que des pièces de rechange et certains équipements
scientifiques. Pour en savoir plus : |
|
ZVEZDA |
|
|
|
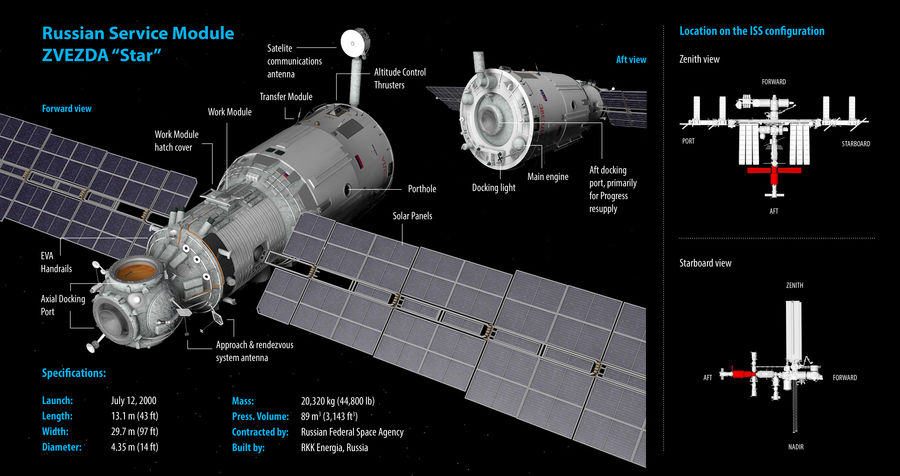
Zvezda (en russe : Звезда, signifiant étoile), DOS-8, ou encore module de service Zvezda, est un composant de la Station spatiale internationale (ISS). Il est chronologiquement le troisième module de la station, et comprend une partie des équipements de vie de la Station et permet d'héberger deux membres d'équipage. C'est le centre structurel et fonctionnel de la partie russe de la Station. Le module est construit par la société RKK Energia. Zvezda est lancé par un lanceur Proton le 12 juillet 2000 depuis le cosmodrome de Baïkonour et s'amarre au module Zarya le 26 juillet 2000. Pour en savoir plus : |
|
POUTRE Z1 |
|
|
|
La première poutre, Z1, est lancée en octobre 2000 par le vol STS-92 et est utilisée comme point de montage temporaire pour la poutre P6 et des panneaux solaires attachés lors du vol suivant de la navette STS-97. La poutre Z1 est la première armature permanente installée sur la station, fournissant la base pour les additions futures des autres poutres. Elle contient le contrôle gyroscopique, des circuits électriques, des équipements de communications et deux générateurs de plasma destinés à neutraliser l'énergie électrique statique produite par les panneaux solaires. Pour en savoir plus : |
|
POUTRE P6 |
|
|
|
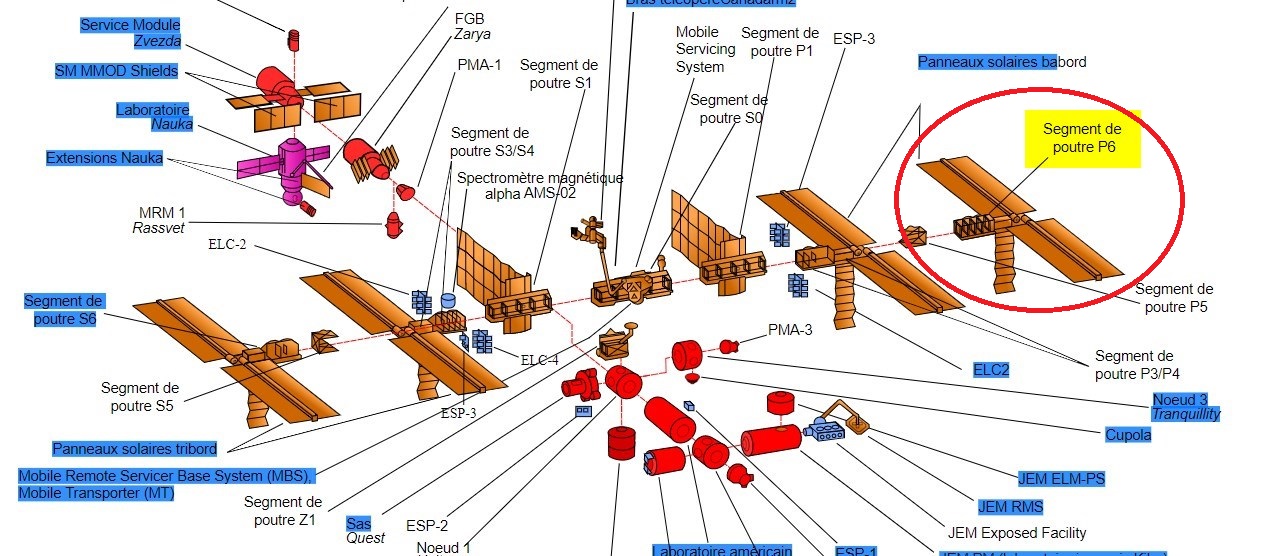
Les poutres P6/S6 supportent un ensemble de panneaux solaires et de radiateurs similaires à P4/S4. Les petits segments de poutres P5/S5 sont uniquement destinés à prolonger P4/S4 et à créer un espace suffisant entre les deux ensembles de panneaux solaires. La poutre P6, avec ses panneaux solaires, est lancée et mise en place très tôt (décembre 2000) par rapport aux autres éléments situés aux extrémités de la poutre (P5, S5, S6, et les panneaux solaires associés) ; elles sont temporairement fixées sur la poutre Z1, avant d’être déplacées à l'extrémité de l'élément P5 en octobre 2007. |
|
DESTINY |
|
|
|
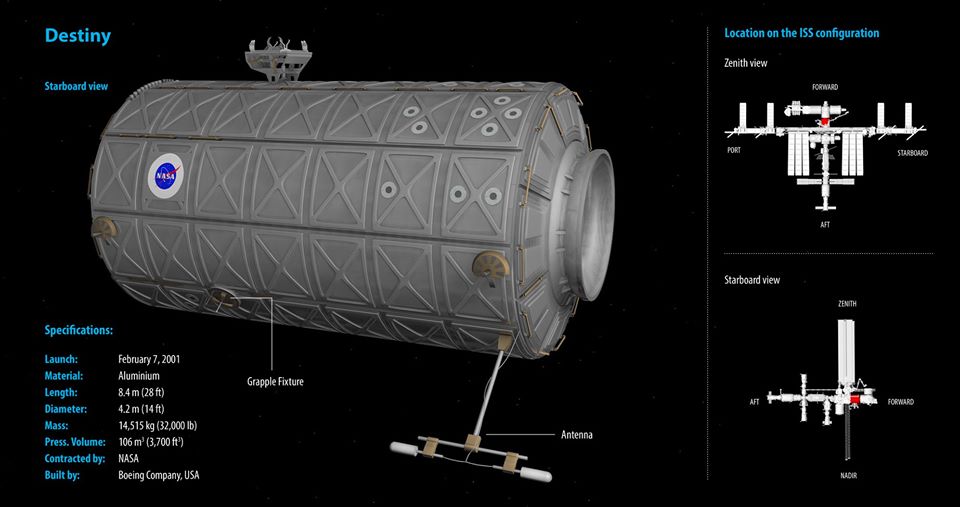
Destiny est le laboratoire spatial pressurisé américain de la Station spatiale internationale. Il est mis en orbite par la navette spatiale américaine et assemblé à la Station spatiale en février 2001 au cours de la mission Atlantis STS-98. Pour en savoir plus : |
|
BRAS CANADARM 2 |
|
|
|
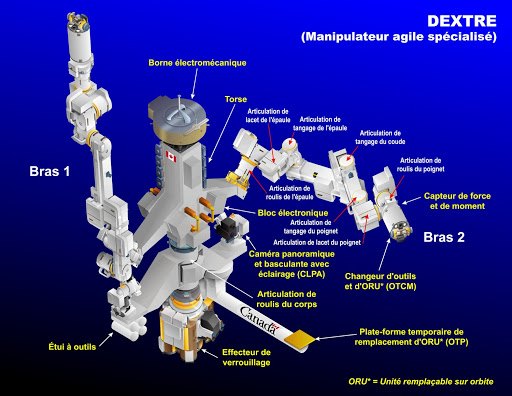
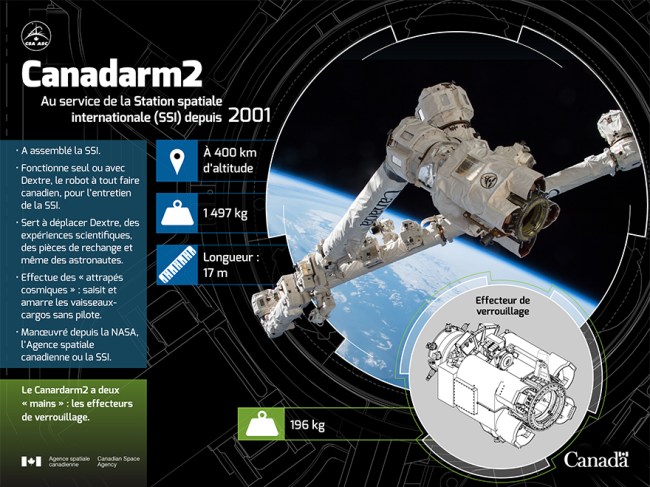
Le système de service mobile, (en anglais : Mobile Servicing System, ou MSS), également appelé par métonymie Canadarm 2, est un équipement externe de la Station spatiale internationale permettant de déplacer des modules et des équipements extérieurs de la Station et pouvant assister les astronautes au cours des sorties extravéhiculaires. Le principal composant est le bras manipulateur Canadarm 2 (également appelé Space Station Remote Manipulator, ou SSRMS). Il peut être attaché sur un chariot mobile (le MBS) circulant sur la poutre de la Station. Canadarm 2 peut utiliser une « main » plus agile - le Special Purpose Dexterous Manipulator ou SPDM - surnommée Dextre pour les manipulations délicates. L'ensemble est commandé par les astronautes depuis l'intérieur de la Station grâce à deux stations de travail dédiées. Les astronautes doivent recevoir un entraînement au sol pour apprendre à utiliser le Canadarm 2.
Le système de service mobile est conçu et réalisé par la société MDA
Space Missions (en) (anciennement appelée MD Robotics et encore
avant, Spar Aerospace). C'est la principale contribution de l'Agence
spatiale canadienne à la Station spatiale internationale. |
|
SAS DE SORTIE OUEST |
|
|
|
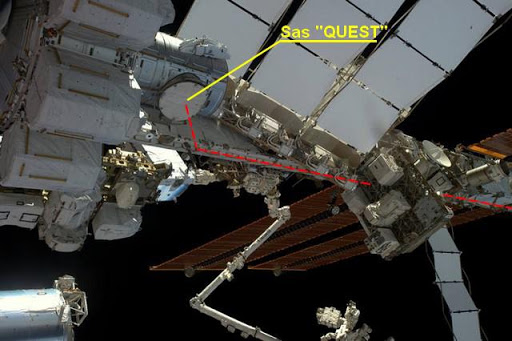
Quest est un des modules de la Station spatiale internationale situé dans le segment américain. Installé en 2001, il joue le rôle de sas pour les sorties extravéhiculaires des astronautes. Il est amarré au module de type « nœud » Unity. Quest est un module d'une masse de 6,1 tonnes à vide, long de 5,5 mètres pour un diamètre maximum de 4 mètres. Il dispose d'un volume pressurisé de 34 m3. Quest est composé de deux cylindres de diamètre différent placés bout à bout, dont la structure est construite en aluminium : le cylindre le plus large, appelé sas d'équipement, est utilisé pour préparer la sortie dans l'espace tandis que le second cylindre plus étroit constitue le sas proprement dit. Pour en savoir plus : |
|
COMPARTIMENT D'AMARRAGE PIRS |
|
|
|
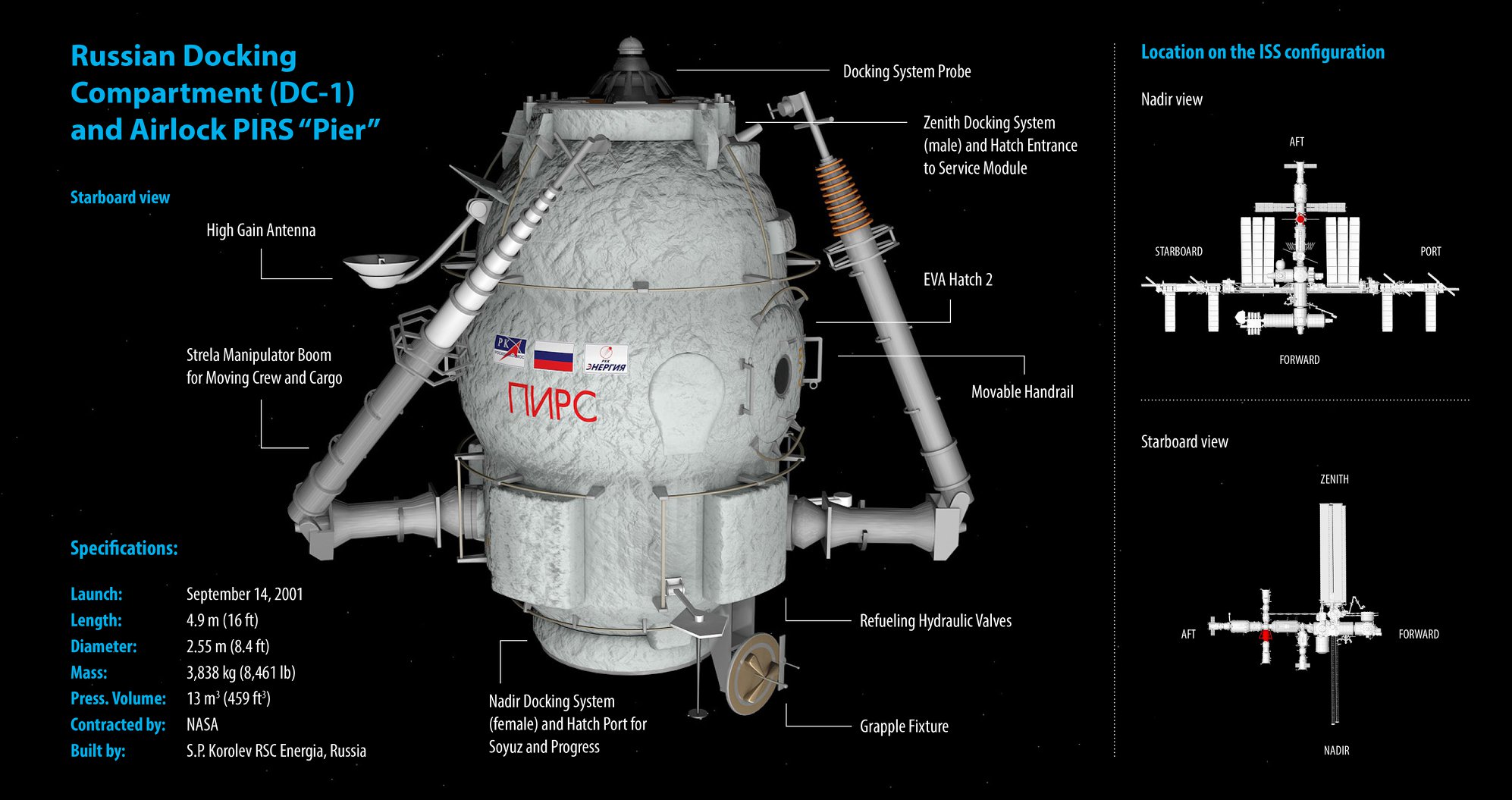
Le compartiment d'amarrage Pirs (russe : Пирс, ce qui signifie « ponton »), également dénommé « Stikovochny Otsek 1 » ou SO-1 (russe : Стыковочный отсек, « compartiment d'amarrage ») est un module russe de la Station spatiale internationale. C'est un des deux modules d'amarrage prévus à l'origine pour la station spatiale. Il est lancé le 14 septembre 2001 par une fusée Soyouz, amarré à un Progress modifié servant de module de propulsion, Progress M-SO1, et s'amarre automatiquement au port d'amarrage situé au nadir (du côté de la Terre) du module Zvezda. Après avoir été configuré par l'équipage de l'Expédition 3 au cours de trois sorties extravéhiculaires, il est mis en service. Il fournit à la station spatiale un sas pour les sorties extravéhiculaires des cosmonautes russes ainsi qu'un troisième port d'amarrage pour le module Progress ou Soyouz. Pour en savoir plus :
Désamarré le 28 juillet et remplacé par Nauka |
|
LA POUTRE DE LA STATION SPATIALE INTERNATIONALE |
|
|
|
Dans l'article suivant je ne fais pas de détail de chaque poutre, l'article recense toutes les poutres de l'Iss. La poutre de la Station spatiale internationale est une structure métallique de plus de 100 mètres de long qui porte les radiateurs qui dissipent l'excès de chaleur de la Station et les panneaux solaires qui lui fournissent son énergie. La poutre sert également de réceptacle à des palettes destinées à recevoir des expériences scientifiques. Elle supporte une voie ferrée sur laquelle circule le support du bras Canadarm 2 qui permet l'assemblage et la maintenance de la Station. Du fait de son encombrement et de sa masse (plus de 100 tonnes) la poutre et les éléments qui s'y rattachent sont montés par éléments par la navette spatiale américaine et assemblés au cours de sorties extravéhiculaires par les occupants de la Station spatiale internationale. La poutre est rattachée via le module central Unity à la partie pressurisée de la Station spatiale. Elle est perpendiculaire à l'axe de progression de la Station spatiale et donc à l'axe formé par les principaux modules pressurisés.
La poutre est construite par Boeing
tandis que les panneaux solaires et les radiateurs sont réalisés par
Lockheed Martin pour le compte de la NASA. |
|
SYSTÈME MOBILE DE SERVICE POUR CANADARM2 |
|
|
|
Le système de service mobile, (en anglais : Mobile Servicing System, ou MSS), également appelé par métonymie Canadarm 2, est un équipement externe de la Station spatiale internationale permettant de déplacer des modules et des équipements extérieurs de la Station et pouvant assister les astronautes au cours des sorties extravéhiculaires. Le principal composant est le bras manipulateur Canadarm 2 (également appelé Space Station Remote Manipulator, ou SSRMS). Il peut être attaché sur un chariot mobile (le MBS) circulant sur la poutre de la Station. Canadarm 2 peut utiliser une « main » plus agile - le Special Purpose Dexterous Manipulator ou SPDM - surnommée Dextre pour les manipulations délicates. L'ensemble est commandé par les astronautes depuis l'intérieur de la Station grâce à deux stations de travail dédiées. Les astronautes doivent recevoir un entraînement au sol pour apprendre à utiliser le Canadarm 2.
Le système de service mobile est
conçu et réalisé par la société MDA Space Missions (en)
(anciennement appelée MD Robotics et encore avant, Spar
Aerospace). C'est la principale contribution de l'Agence
spatiale canadienne à la Station spatiale internationale. |
|
HARMONY |
|
|
|
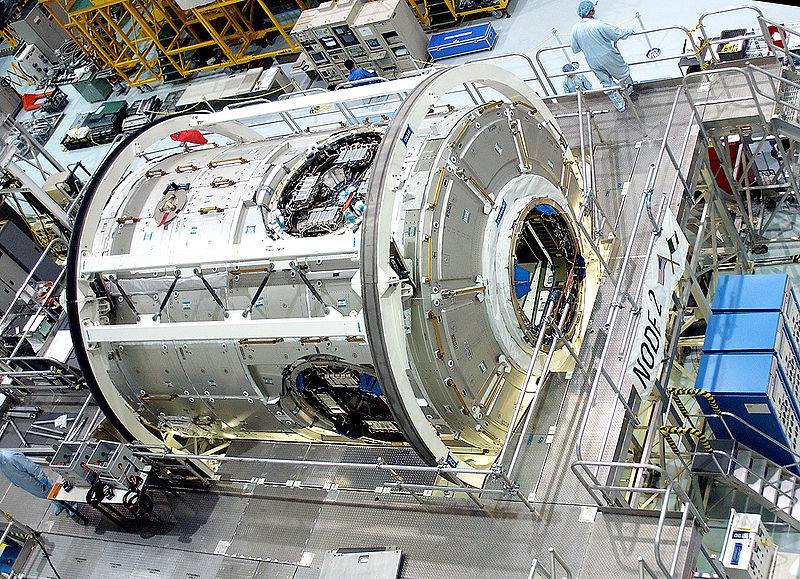
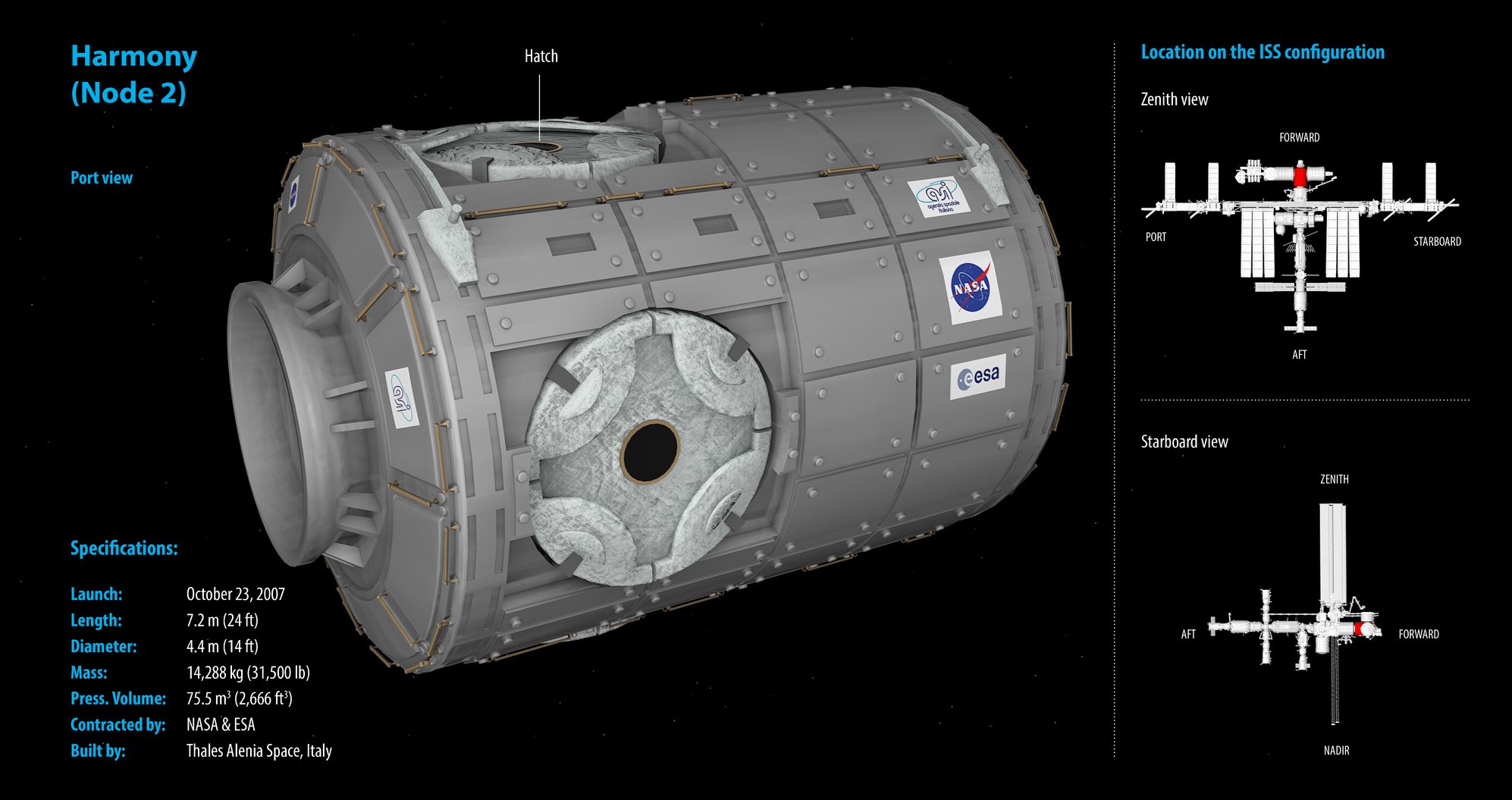
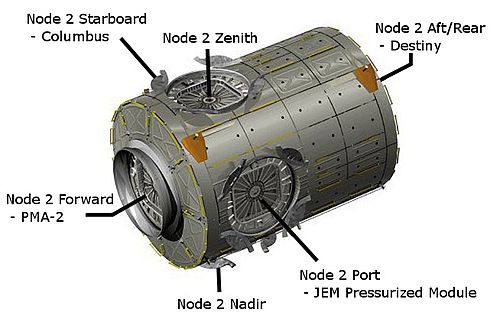
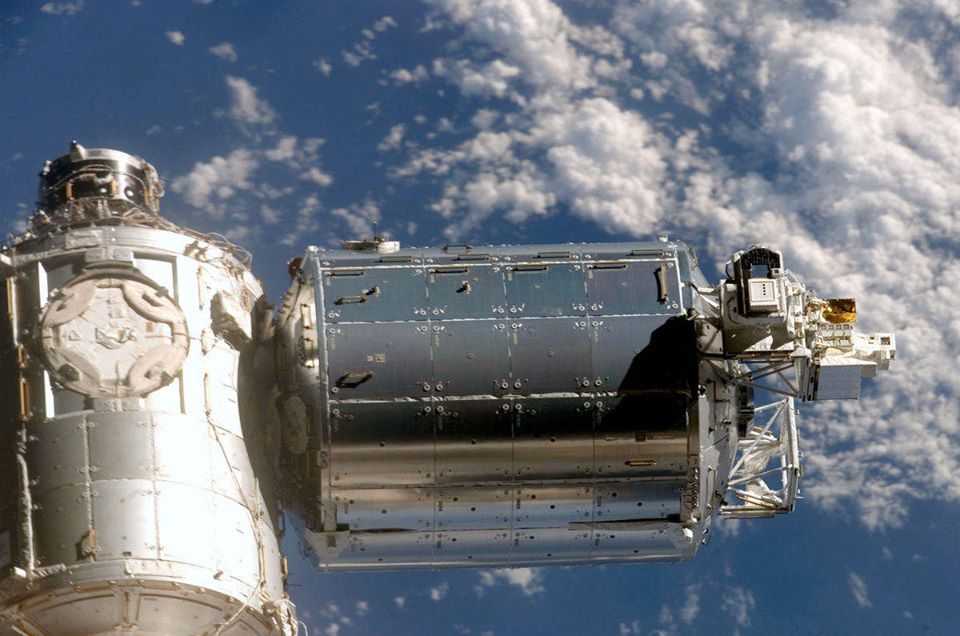
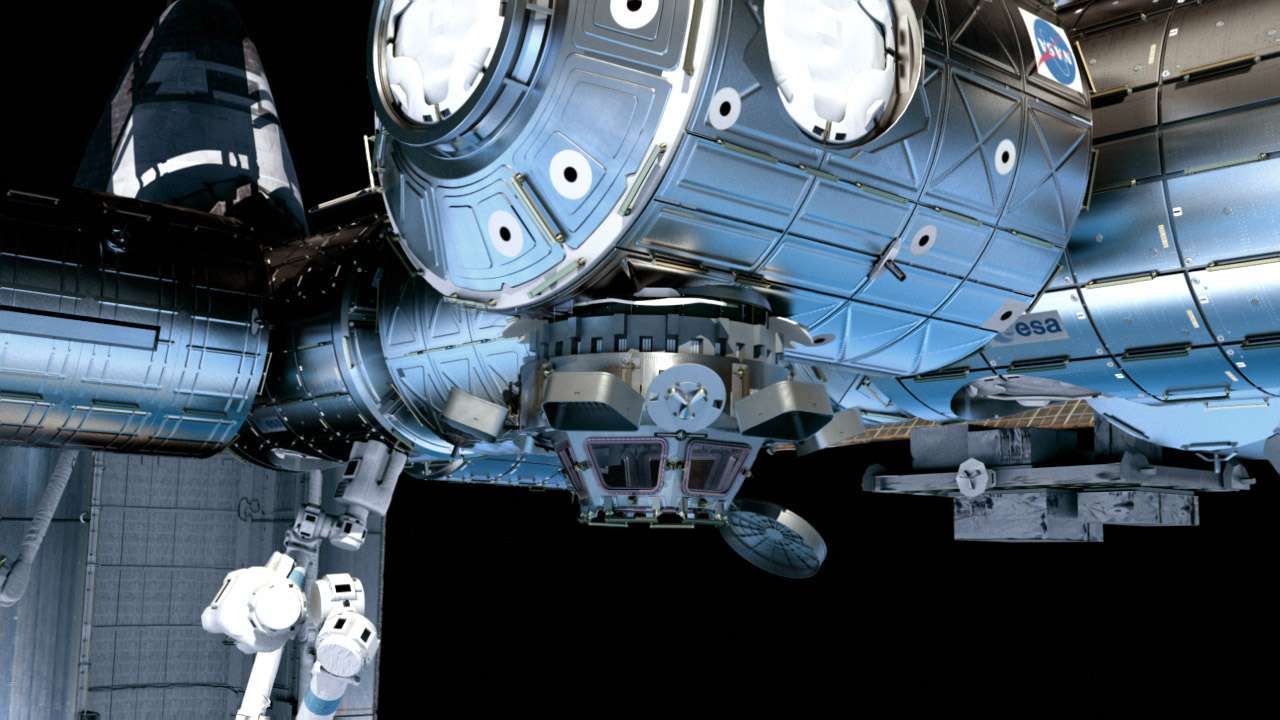
Le module Harmony (auparavant connu comme Node 2 - « nœud 2 ») est un des modules pressurisés de la Station spatiale internationale (ISS) construit en Italie qui assure la liaison entre le laboratoire européen Columbus, le module laboratoire américain Destiny et le module laboratoire japonais Kibō. Le module est long de 7,2 mètres et a un diamètre de 4,4 mètres. Il a une masse de 14,5 tonnes au lancement et de 15,3 tonnes avec la charge utile. Le volume pressurisé est de 70 m3. C'est un module de type nœud c'est-à-dire que son rôle principal est d'assurer la liaison avec les autres modules. Il dispose à cet effet de 6 ports d'amarrage de type Common Berthing Mechanism (CBM) qui permettent de le connecter à d'autres modules ou à des vaisseaux spatiaux disposant du même type de port d'amarrage. La conception du module s'inspire à la fois de celle du module Columbus de l'Agence spatiale européenne et du module logistique multi-usages1. Le module Harmony contient 8 emplacements pour des rangements amovibles de type ISPR (baies). Les 8 modules qui sont installés fournissent de l'air, de l'électricité, de l'eau et d'autres systèmes de survie pour les astronautes. Pour en savoir plus : |
|
LE LABORATOIRE COLOMBUS |
|
|
|
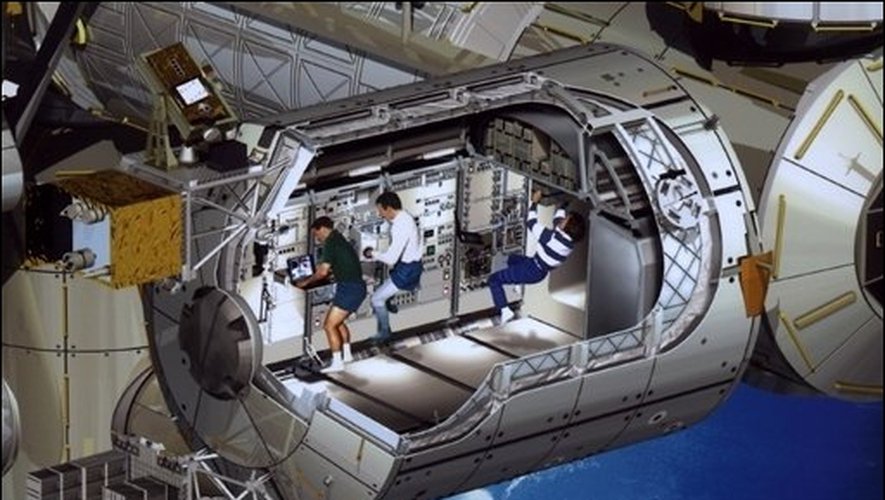
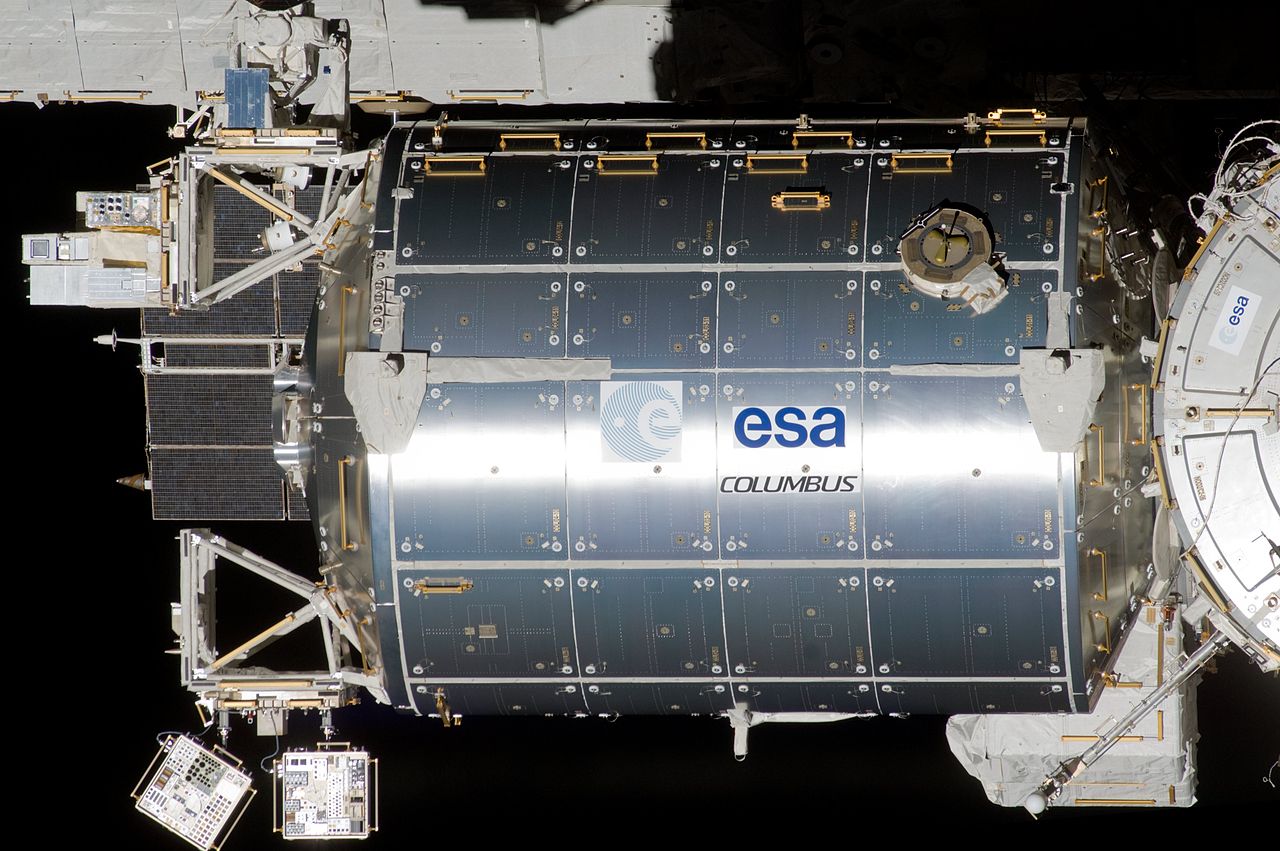
Le laboratoire européen Columbus, (ou Columbus Orbital Facility, plus simplement appelé Columbus), est un laboratoire spatial pressurisé construit en Italie et faisant partie de la Station spatiale internationale. Son lancement, initialement prévu fin 2004 est reporté principalement en raison de l'explosion de la navette spatiale Columbia en février 2003 et de l'arrêt des lancements qu'elle entraîne. Le lancement a finalement lieu le 7 février 2008 par la navette spatiale américaine Atlantis lors de la mission STS-122 et il est amarré à la Station depuis le 11 février 2008. Ses utilisations scientifiques sont multiples et portent sur la science des matériaux, la physique des fluides, les sciences de la vie, la physique fondamentale et de nombreuses autres technologies. Plusieurs centaines d'expériences par an sont réalisées au sein de Columbus. La mise en fonctionnement du laboratoire permet à l'ESA de disposer de la possibilité d'utiliser 6 à 7 % de tous les équipements et des ressources de la Station spatiale internationale. Mais le plus important est le fait que les chercheurs européens peuvent désormais y mener des expériences scientifiques en continu et non plus, au coup par coup, selon les disponibilités des autres copropriétaires. Pour en savoir plus : |
|
LE LABORATOIRE KIBO |
|
|
|
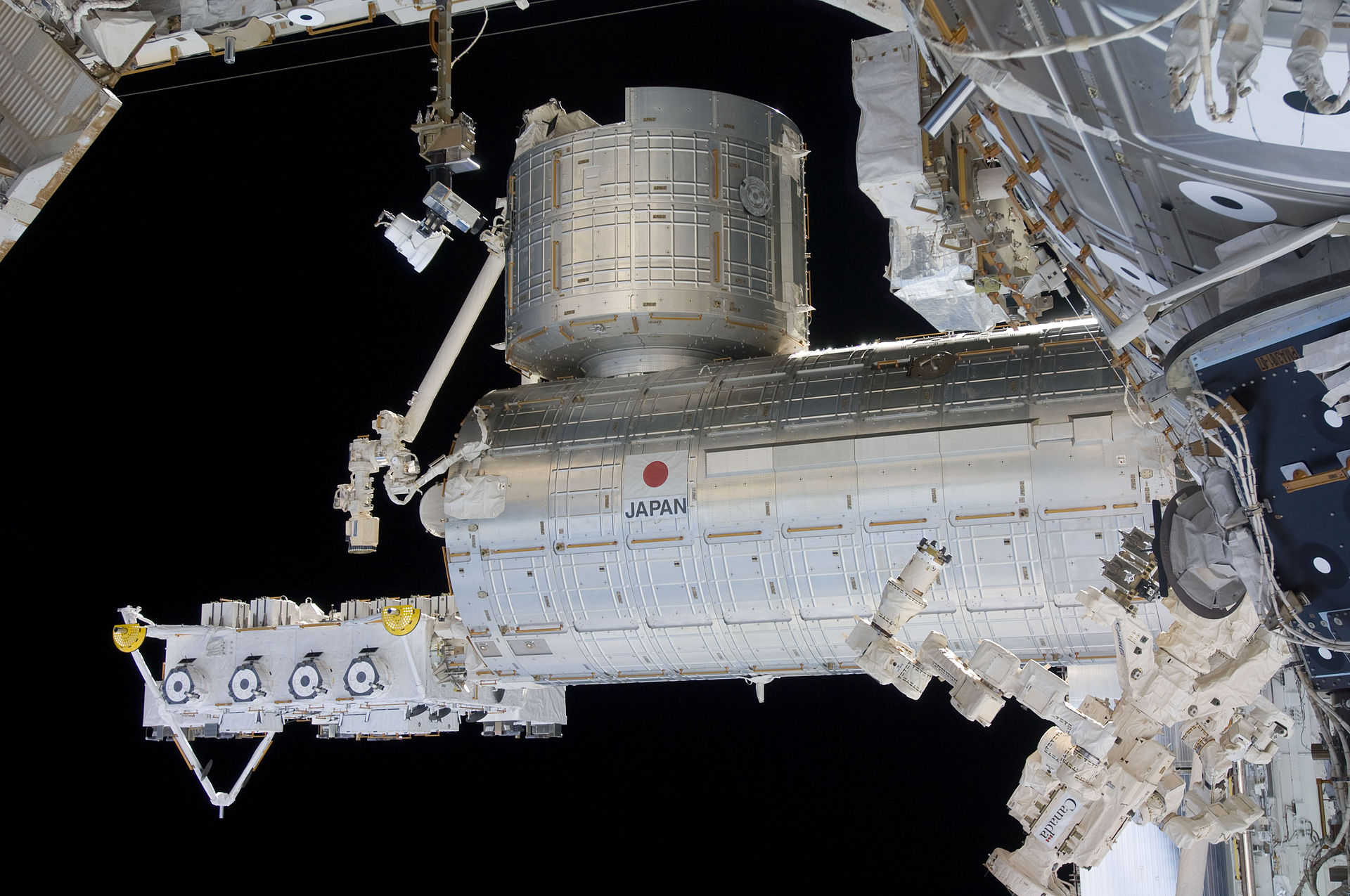
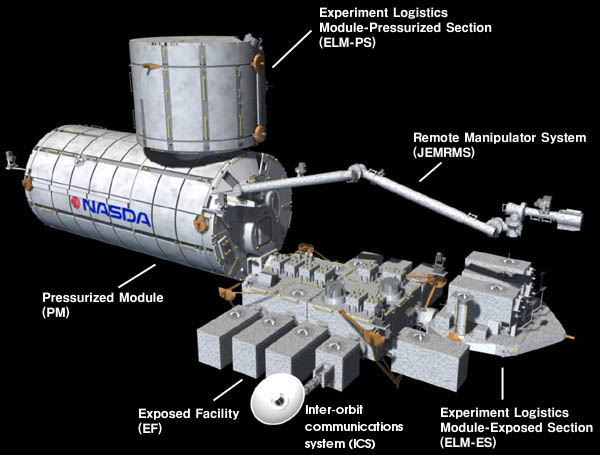
Le JEM (Japanese Experiment Module), baptisé Kibō
(希望, « espoir », écrit en kana : きぼう) est un ensemble de composants
et modules à vocation scientifique de la Station spatiale
internationale développé par l'Agence d'exploration aérospatiale
japonaise (JAXA). Ces composants sont mis en orbite dans le cadre de
trois missions de la navette spatiale américaine en 2008 et 2009.
Kibō qui est relié au reste de la Station spatiale via le module
Harmony comprend cinq sous-ensembles dont le module pressurisé
principal, des plateformes externes destinées à accueillir des
expériences scientifiques, des pièces de rechange exposées dans
l'espace ainsi que deux bras robotiques pour manipuler les
composants extérieurs. La partie pressurisée contient un sas utilisé
pour faire entrer ou sortir les expériences scientifiques et 32
rangements amovibles occupés par des équipements scientifiques et de
support vie. |
|
MODULE POISK |
|
|
|
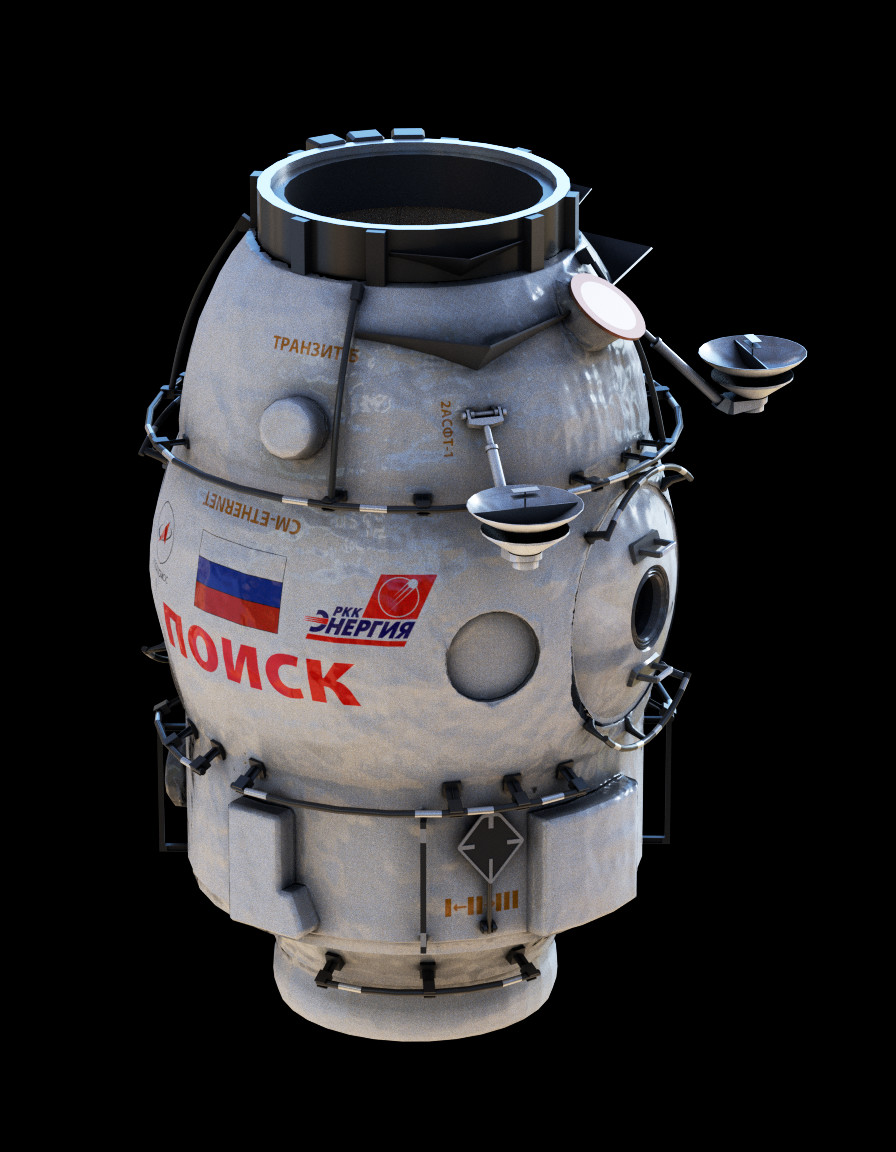
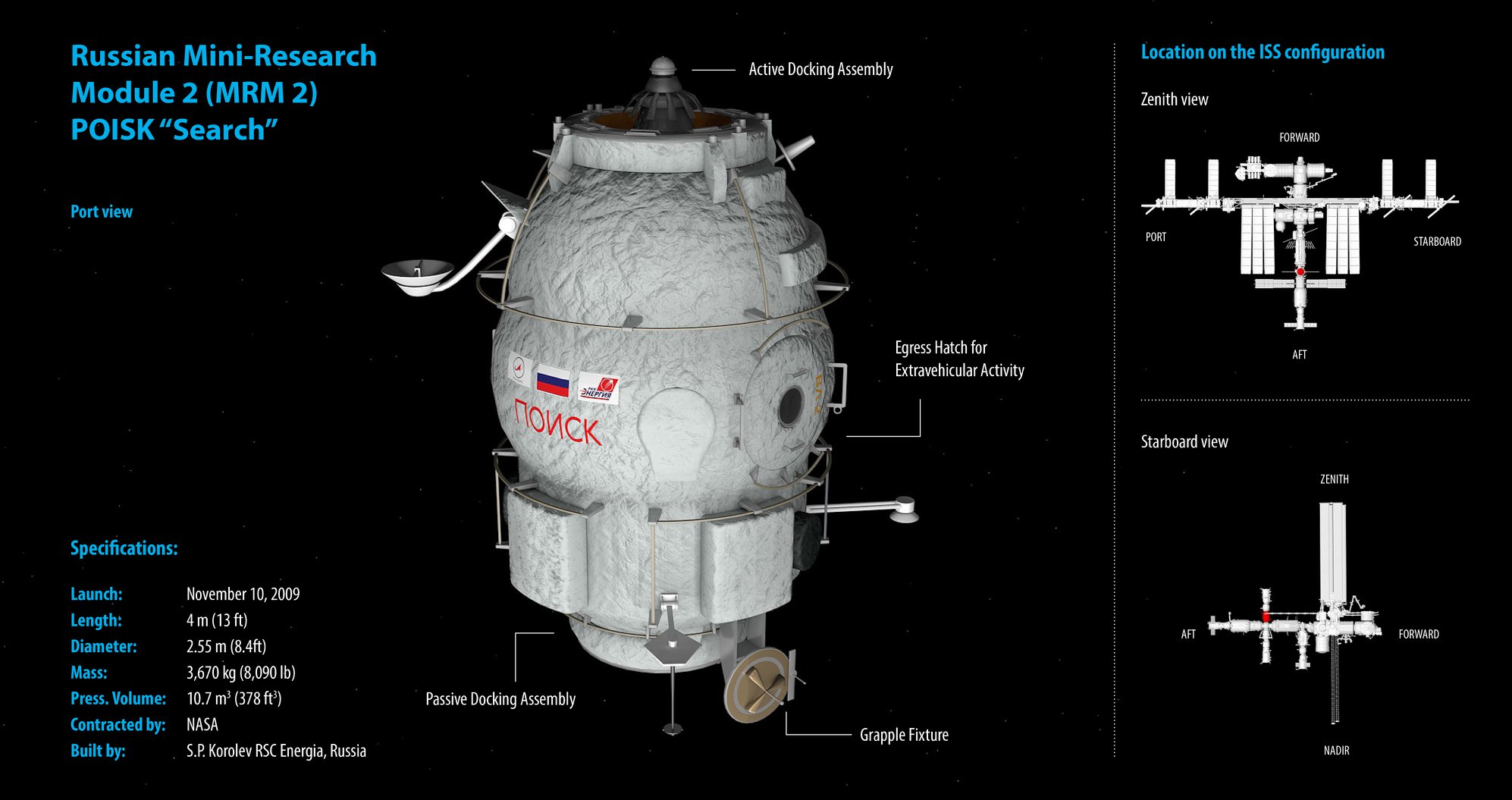
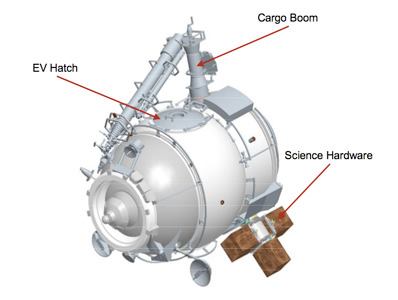
Poisk (en russe : По́иск ; en français Recherche)
ou MRM2 est un module spatial russe de la Station spatiale
internationale de petite taille qui dispose d'un port d'amarrage
pour les vaisseaux spatiaux et dispose d'un sas pour les sorties
extravéhiculaires. Il est entré en service en novembre 2009. Poisk
permet également de réaliser des expériences scientifiques à
l'intérieur et à l'extérieur du module. C'est le premier module
russe ajouté à la station spatiale depuis 2001. Outre sa fonction
principale, il est conçu pour permettre des sorties
extravéhiculaires. |
|
TRANQUILITY |
|
|
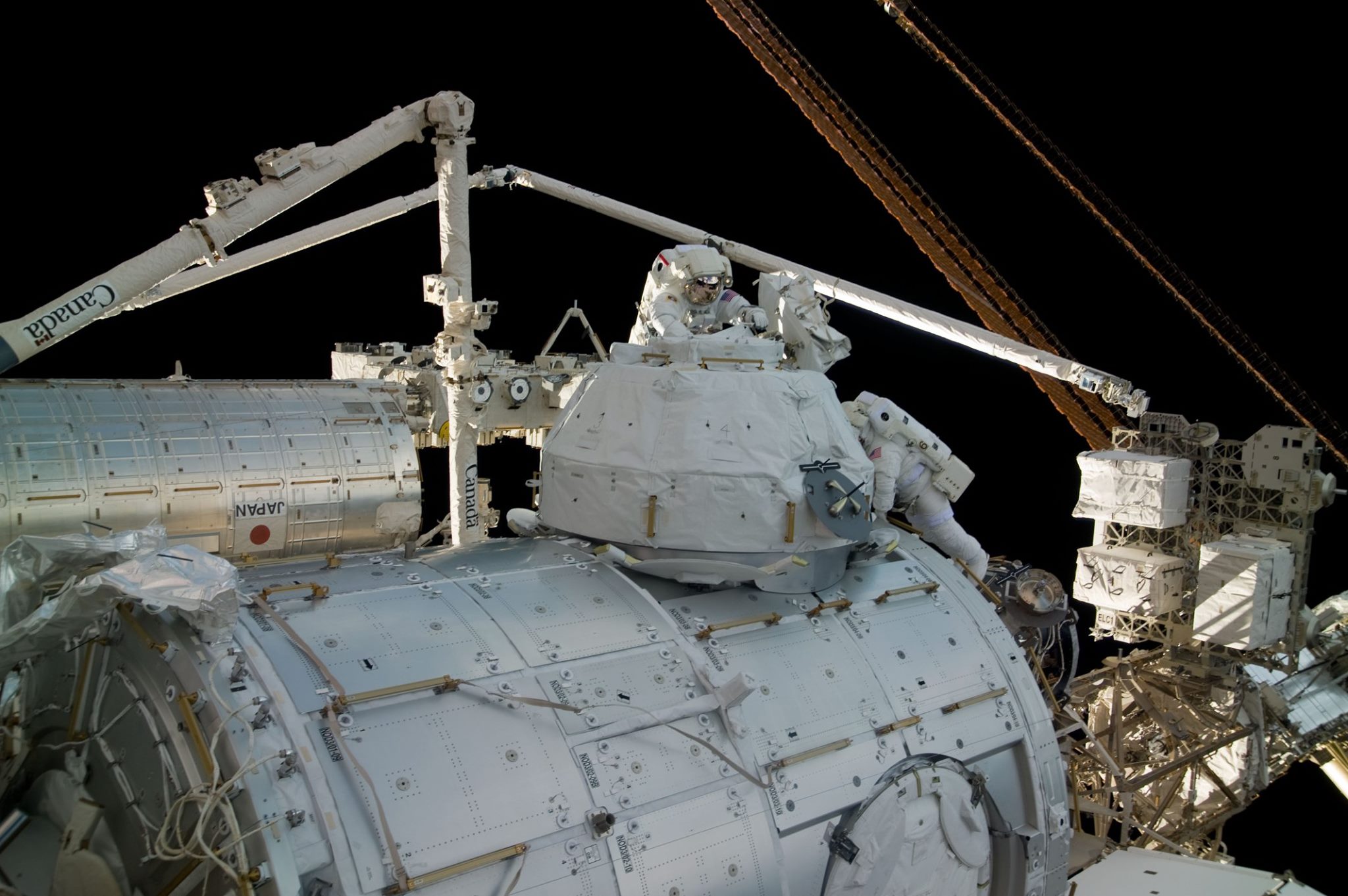
Tranquility (également appelé
Node 3 en anglais) est un élément de la Station spatiale
internationale (ISS) construit en Italie qui reprend en partie le
rôle du module d'habitation prévu à l'origine et dont la réalisation
est annulée. Il permet grâce à ses 6 ports d'assurer la liaison avec
6 autres modules. Son rôle principal est de servir de quartier
d'habitation, d'abriter les installations de support vie ainsi que
le poste d'observation, la cupola. Celle-ci est utilisée pour
piloter le bras Canadarm 2 chargé de déplacer les composants à
l'extérieur de la Station spatiale. Tranquility est réalisé par
Thales Alenia Space dans son usine de Turin pour le compte de la
NASA. Il est installé en février 2010 dans le cadre de la mission
STS-130 de la navette spatiale américaine Endeavour. |
|
RASSVET |
|
|
Rassvet (russe : Рассве́т;
c'est-à-dire aurore) ou MRM-1 est un module russe de la station
spatiale internationale pour l'accostage des vaisseaux russes et le
stockage. Il a rejoint la station spatiale le 16 mai 2010 transporté
par la navette spatiale américaine au cours de la mission STS-132.
Rassvet est également connu sous l'appellation module d'accostage
cargo (Docking Cargo Module ou DCM), mini module de recherche 1
(Mini-Research Module 1 ou MRM 1), Малый исследовательский модуль,
ou МИМ-11. |
|
LA CUPOLA |
|

|
La Cupola est une coupole d'observation
panoramique de la Station spatiale internationale (ISS), construite
principalement par la société Alenia Space au titre de la
participation de l'Italie au programme spatial européen. Elle offre
aux astronautes une vue panoramique permettant à un opérateur de
télécommander le bras robotique Canadarm 2 durant les opérations
d'entretien et d'assemblage. Elle est également utilisée pour les
opérations d'arrimage des vaisseaux spatiaux. Placée sur le côté de
la station spatiale faisant face au sol terrestre, elle fournit un
poste d'observation visuel exceptionnel sur la Terre. La Cupola est
une extension du module Tranquility qui est assemblé à la Station
spatiale au cours de la même mission de la navette spatiale
américaine STS-130. |
|
MPLM |
|

|
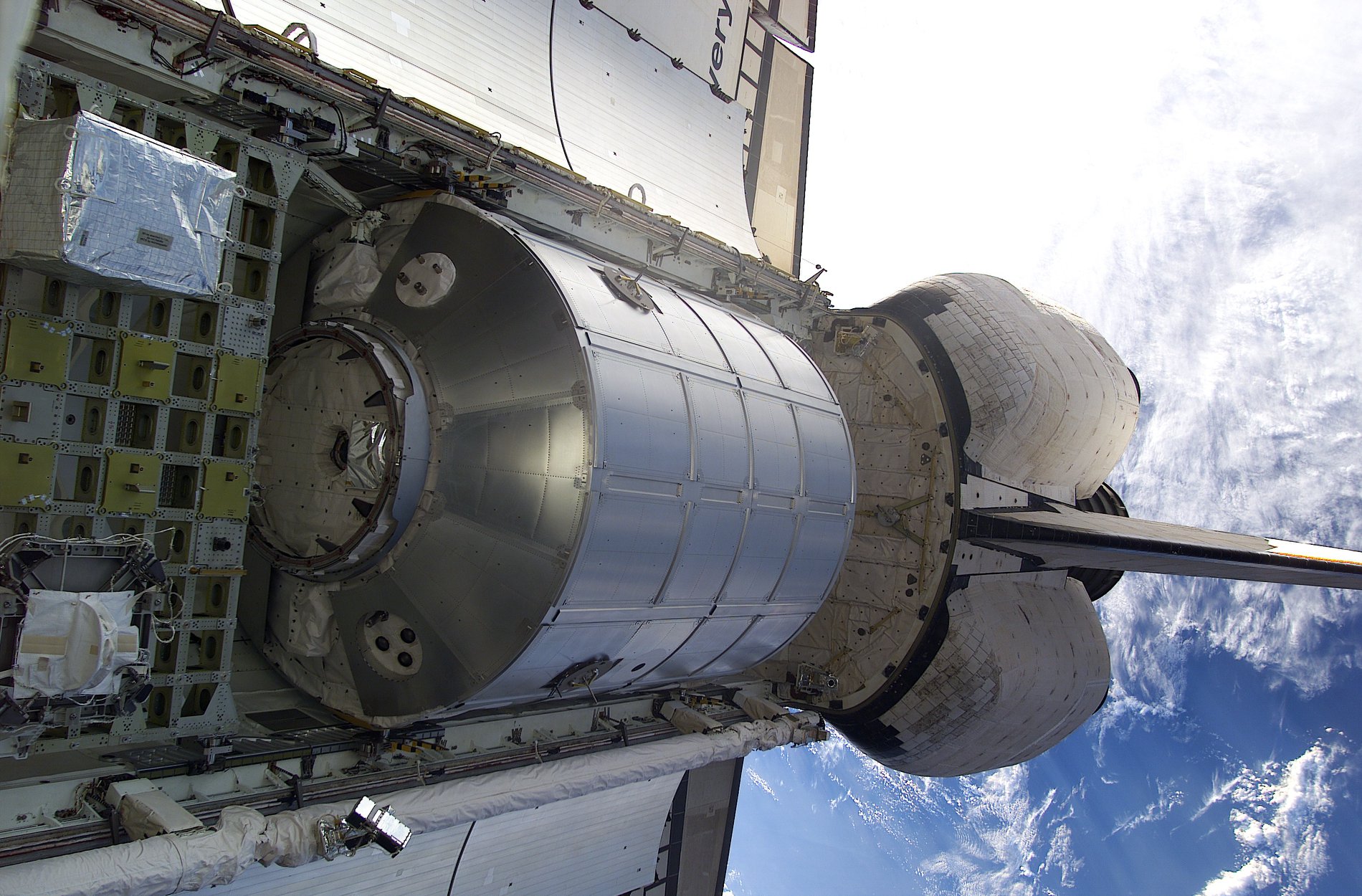
Le Module logistique multi-usages (en anglais :
Multi-Purpose Logistics Module ou MPLM) est un conteneur pressurisé
utilisé dans le cadre des missions de la navette spatiale américaine
pour transférer du fret à destination et en provenance de la Station
spatiale internationale. D'une capacité de 10 tonnes, il est
transporté dans la soute de la navette spatiale et amarré au module
Unity ou au module Harmony de la Station. Lorsque les équipements et
le ravitaillement qu'il contient sont déchargés, les résultats
d'expériences et les déchets chargés, le Module logistique est
replacé dans la soute de la navette pour le retour sur Terre. |
|
BEAM |
|

|
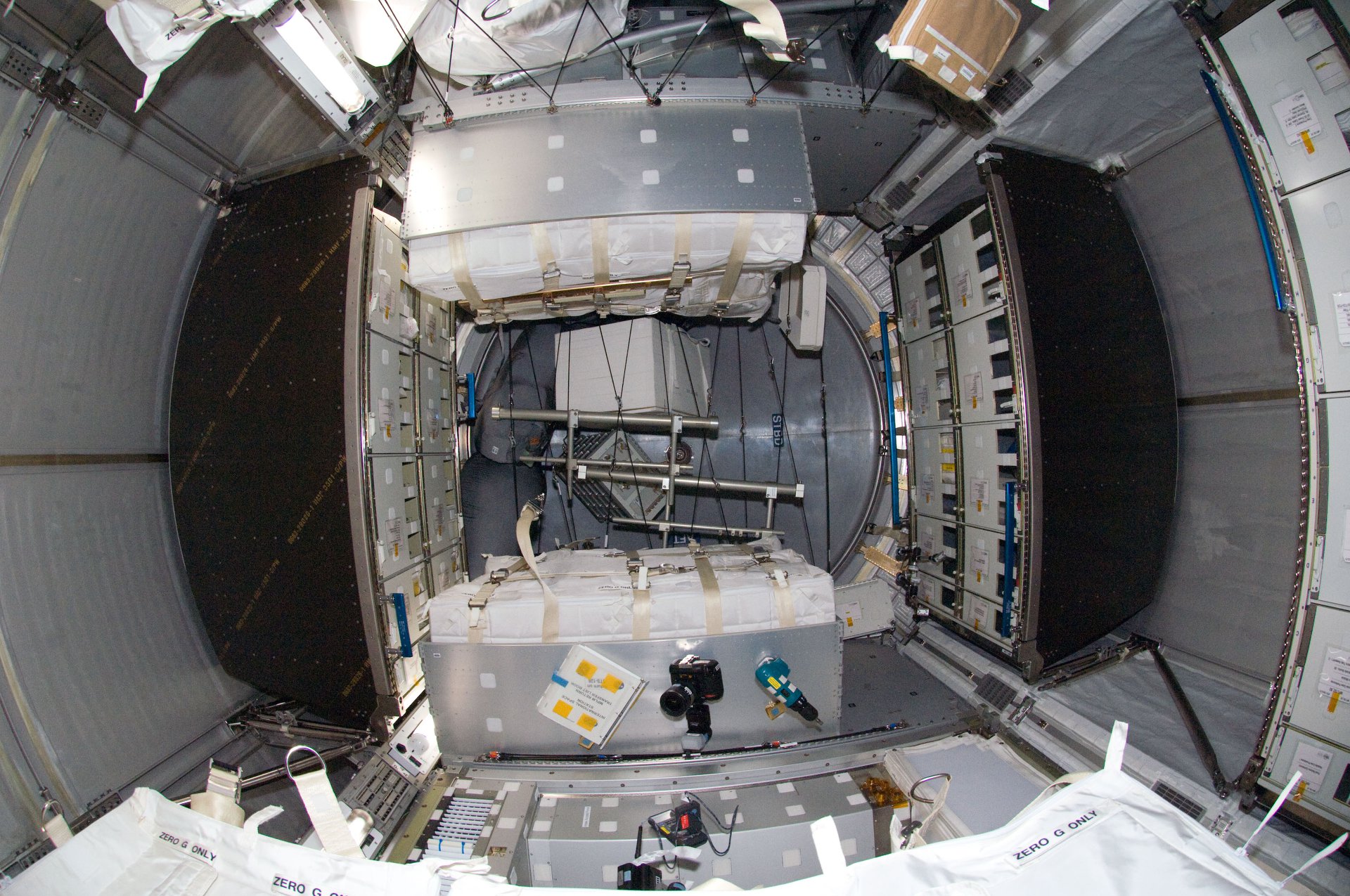
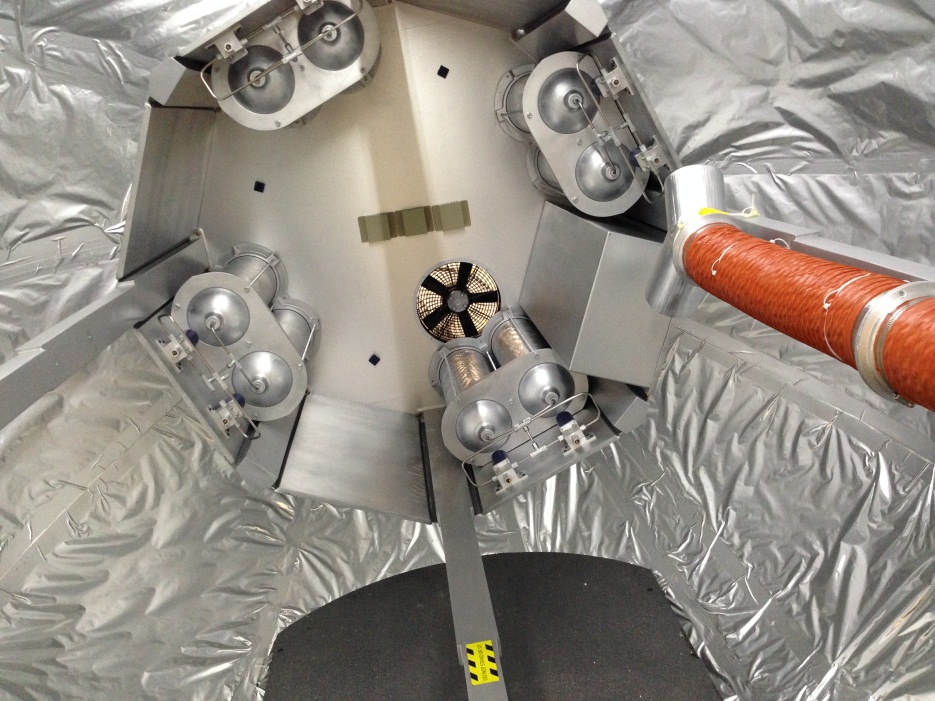
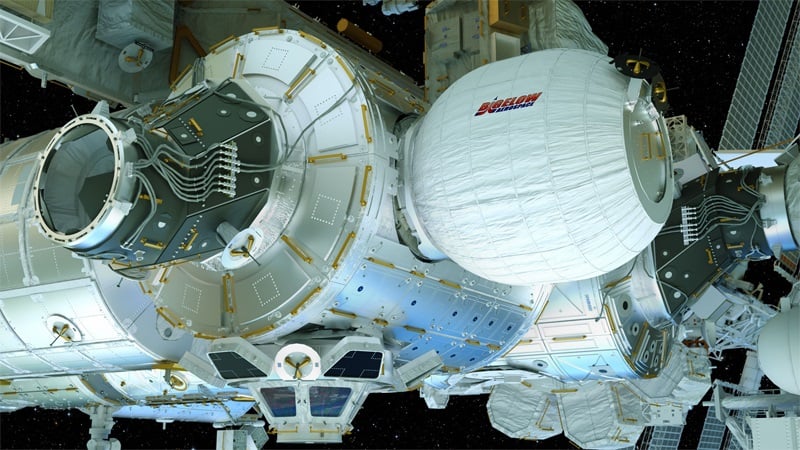
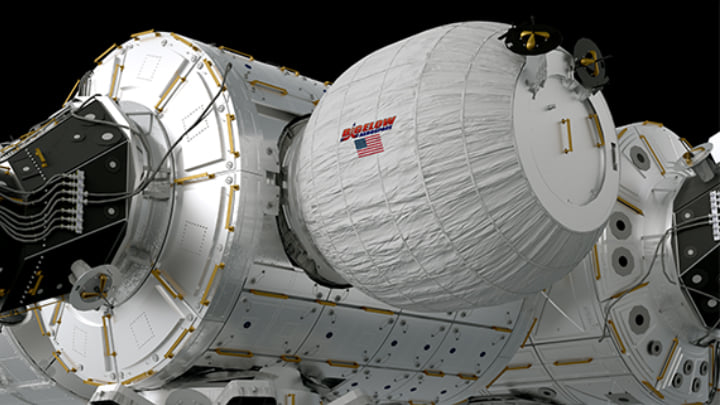
BEAM (acronyme de Bigelow
Expandable Activity Module) est un module habitable expérimental
développé pour la Station spatiale internationale qui doit permettre
de tester la technique de l'habitat spatial gonflable. Le module,
dont le volume interne pressurisé une fois déployé est de 16 m3, est
amarré à la station spatiale en avril 2016 et il sera testé durant 2
ans. Cette expérience développée par la société Bigelow Aerospace
pour le compte de la NASA en exploitant des technologies mises au
point pour le projet TransHab doit permettre à l'agence spatiale
américaine d'accroître sa maîtrise technologique de ce mode de
construction qui permet une réduction de masse et donc de coût de
lancement. |
|
SOYOUZ |
|
 |
Le Soyouz (Союз, qui veut dire Union en russe) est la capsule russe utilisée depuis 1967. Actuellement, elle sert uniquement à transférer les astronautes vers la Station spatiale internationale. Le Soyouz-MS est la version la plus récente, une modification du Soyouz-TMA en service depuis 2016. Le vaisseau possède trois modules au lieu de deux. La capsule pèse 7,25 tonnes, mesure 10 mètres de hauteur et 2,65 mètres de largeur. Elle peut emporter jusqu’à trois membres d'équipage à son bord. La capsule est lancée depuis un lanceur Soyouz 2.1a l’évolution la plus poussée de la R-7 Semiokra. La capsule possède un système de type sonde-cône pour s’arrimer à d’autres engins spatiaux. Contrairement à la capsule Voskhod, le Soyouz possède une tour de sauvetage au décollage. |
|
CREW DRAGON |
|
 |
La Crew Dragon est une capsule moderne, la première à utiliser des commandes tactiles. Le premier vol d’essai avec équipage a eu lieu le , et le retour sur Terre fut un succès. La capsule est développée par une société privée, Space X, avec la collaboration de la NASA. Elle a comme unique rôle de transporter les astronautes vers la Station spatiale internationale. Elle est lancée sur une Falcon 9, fusée également produite par Space X. C’est la première fois depuis neuf ans qu’une capsule spatiale américaine rejoint la Station spatiale internationale depuis l’arrêt en service des navettes spatiales américaines. La capsule peut transporter sept astronautes, comme la navette spatiale. Elle mesure 8,23 mètres de haut et 3,96 de large. Elle pèse environ 13 tonnes. La capsule peut être réutilisée, ce qui est financièrement avantageux. Elle possède comme particularité d’avoir les propulseurs de secours, nommés SuperDraco, sur les côtés de la capsule. |
 |
Voilà maintenant en
vidéo la
construction de l'ISS auquel j'ai présenté dans les précédents posts.
Une autre vidéo : l'International-Space-Station |
|
|
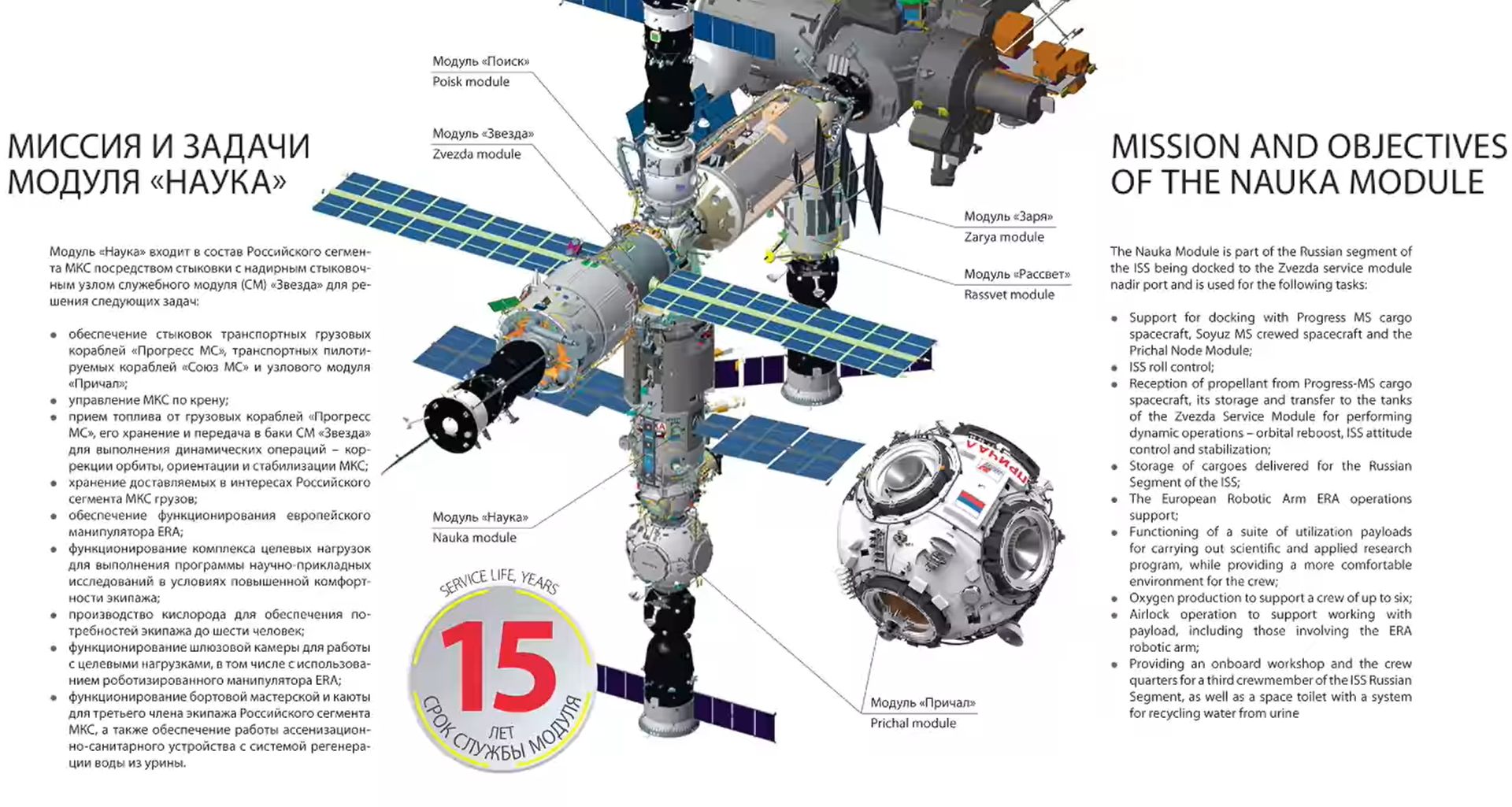
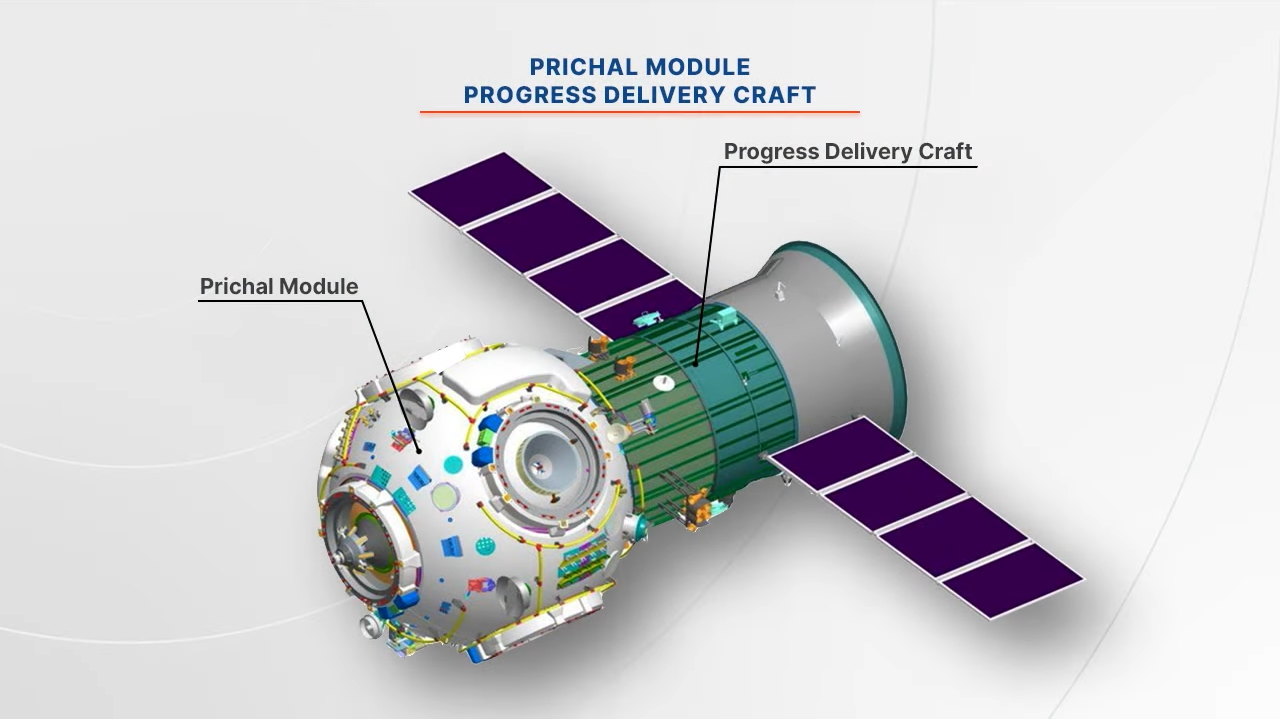
NAUKA À rejoint la station le 29 juillet 2021 Puis Prichal, le noeud pour 5 ports d'ammarage Le module Prichal est une pièce sphérique qui pèse un peu moins de 4 tonnes, et dont le volume interne est de 14 m3. Il est ainsi plus volumineux qu’une capsule Crew Dragon qui possède un volume pressurisé d’environ 9,3 m3. Prichal a été spécialement conçu pour augmenter la capacité d’amarrage de la partie russe de l’ISS. Le module possède en effet 6 ports d’amarrage. L’un de ces ports va se connecter au module Nauka tandis que les 5 autres pourront être utilisés par les vaisseaux venant de la Terre, qu’ils soient habités ou qu’ils transportent uniquement du matériel.
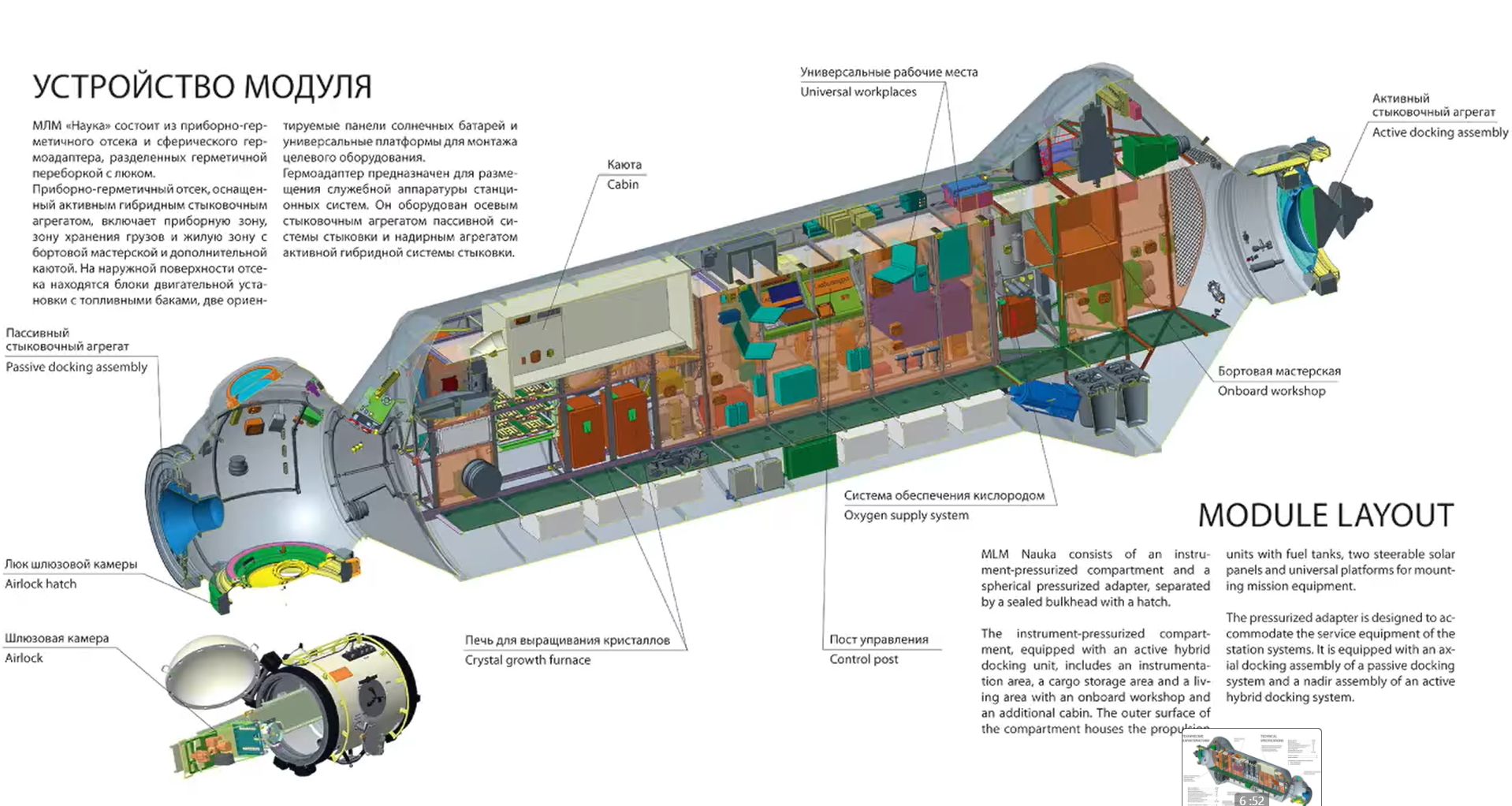
Visite du module Nauka avec Thomas Pesquet
|
|
Photo esa / nasa Autre lien |
|